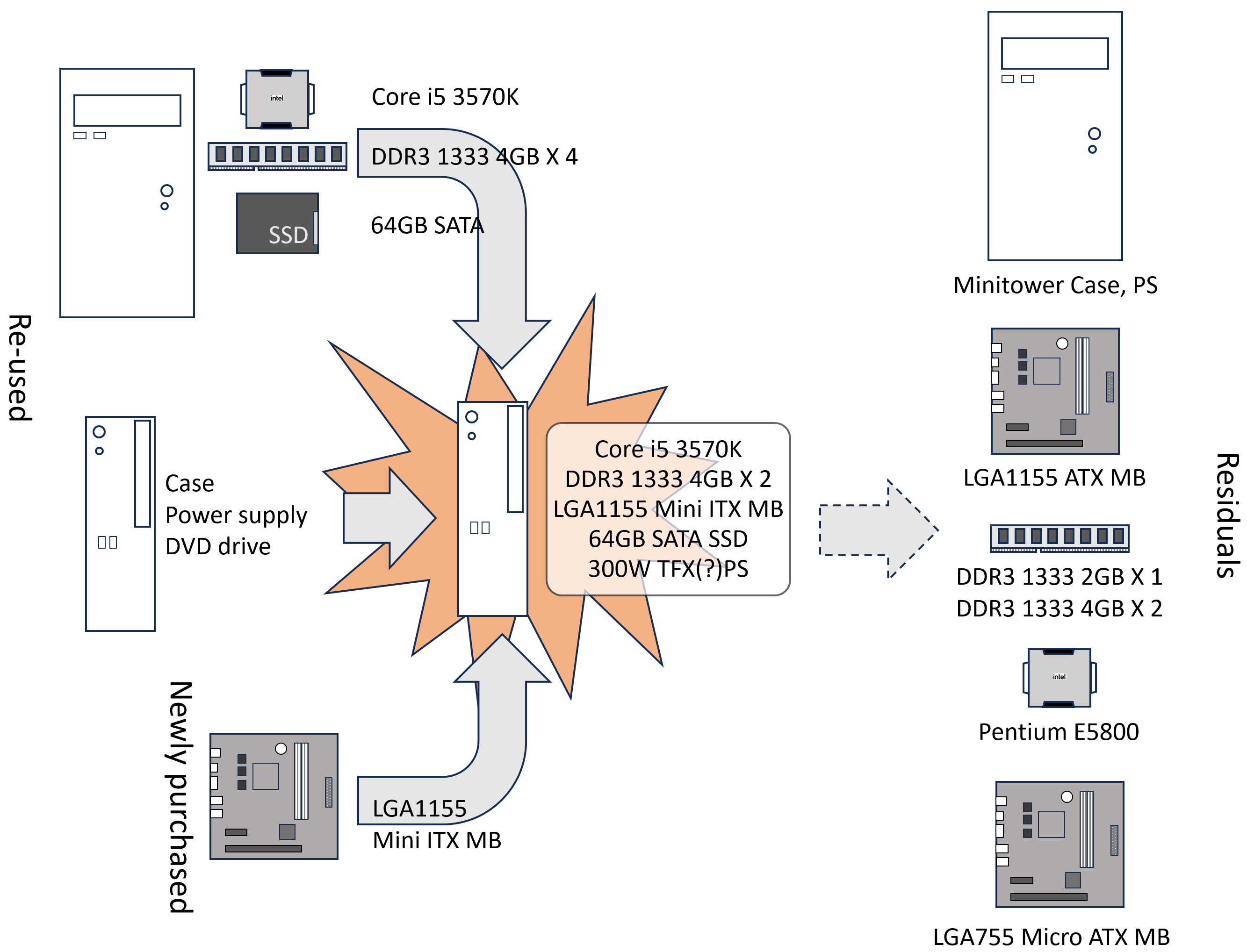
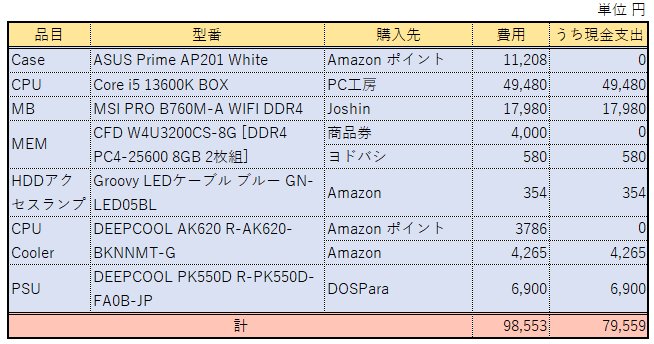
PC更新決行記1に続き、今回は各コンポーネントの記録。製品の仕様、全体の姿形は他の数多あるWebを見てもらうこととして、硬派の私は、自分の視点から見た所見を記すのみ。嬉しがって写真を撮ったのを掲載しているだけとも言う
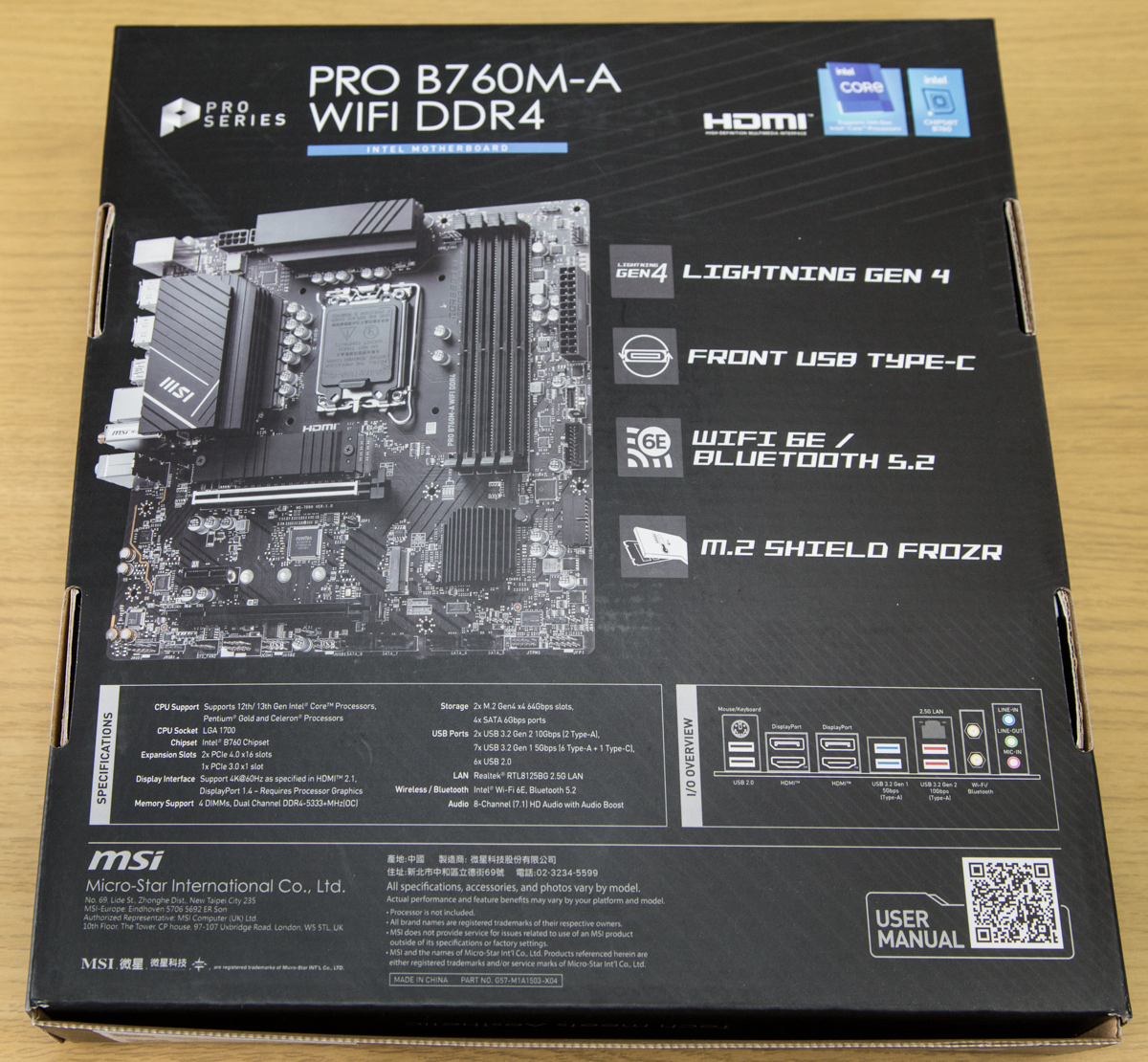
■ まずはMother board – MSI PRO B760M-A WIFI DDR4
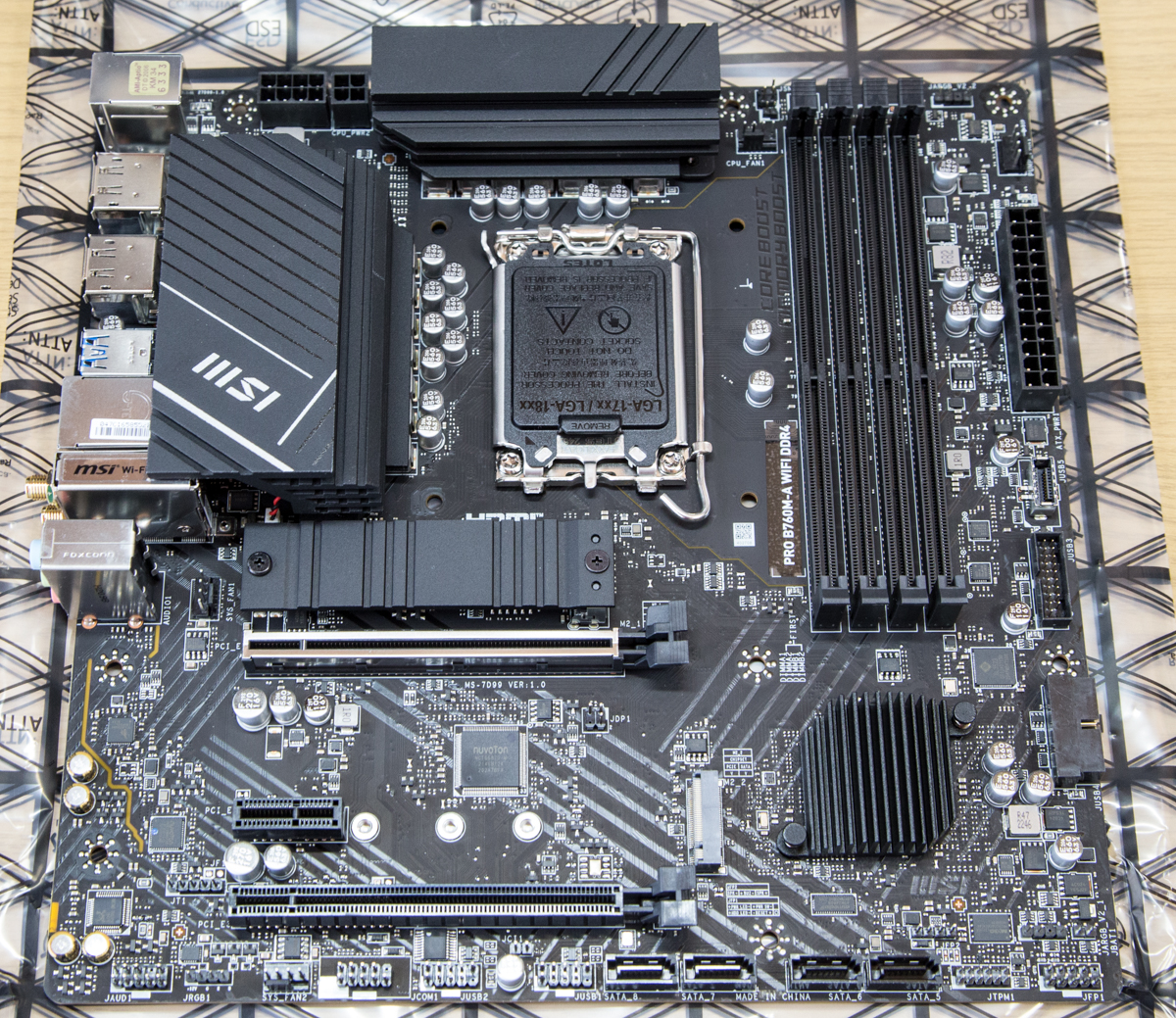
希望通りメモリスロットが4つ。これで将来のメモリ増設にも万全。
画面左のI/OポートにWifiアンテナの金色の端子が見えるが、WiFiモジュールはアンテナ端子と直結されているようだ。他のMother boardは2240のM.2スロットがあり、それにモジュールが挿入されている形だったが、これはそうではなかった。
ストレージ用のM.2スロットは2つ。電源部分にヒートシンクがある。電源は12+1+1フェーズと、他の同じ価格帯のMother boardと比べると大きい数字になっている。この数字は他の同価格帯のものと比べると多いので、頼もしい。
これまでの経験上、BIOS上の設定の保存や、RTC(Real Time Clock)の駆動のためにボタン電池が必須だったのだが、今回その影も形もない。また、CMOSクリアのジャンパピンも見当たらない。どうなっているのか、識者のコメントを待ちたい
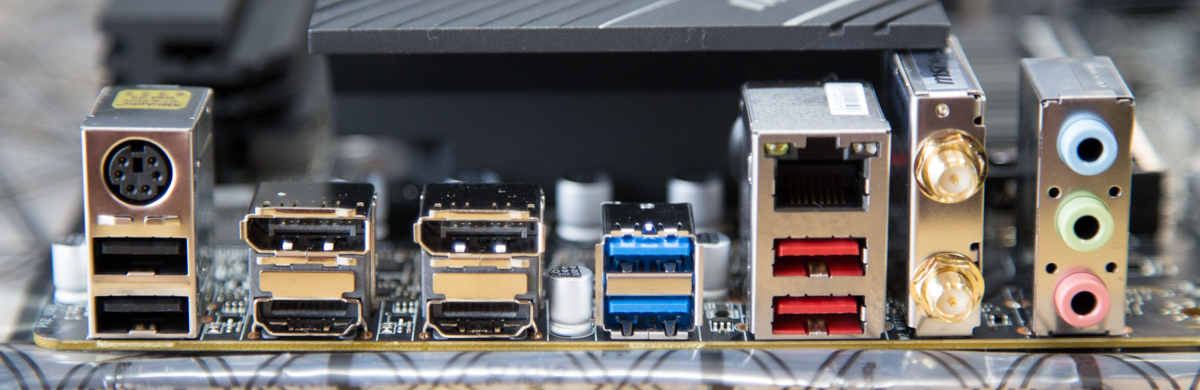
I/Oポート。USB3.2 Type Cのジャックを備えているMother boardを多く見るが、これにはそれがない。その代わり、前面ポート用にUSB3.2 Gen.1 Type CとUSB3.2 Gen.2 Type Aのヘッダがあるので問題ない。背面にType Cがない代わりに、Type Aが6ポートあるので、その方が好都合だ。他のMother boardにはType Cがある代わりにType Aが一つ少ないものが多い。PS2端子もあるので、何ならUSB接続のキーボードをアダプタ経由で繋げてType Aを有効に 活用することもできる
WIFIのアンテナ端子の場所の都合で、ミニタワーケースを立てて設置した場合、アンテナは上にあるLAN端子やUSB端子を回避するために、ナマズの髭のように左右に倒した形に向けなければならないと思うが、電波の指向性、偏波面の見地から悪影響はないのだろうか
HDMI、DPそれぞれが2ポートずつあるのが個性的。型番にProとあるので、株式トレーダー、為替ディーラー等で、グラフィクスボードはいらないが、4画面表示が必要な人向けの装備かも知れない。手持ちのディスプレイの都合上、このPCには、DPとDVI接続をする必要があるので、DPまたはHDMIジャックのどれかにアダプタを噛ませてDVI接続する必要がある。GTX750 Tiのグラフィクスボードより、このMother Boardのグラフィクス性能が勝っている場合はアダプタを買って接続したいと思う
「株式トレーダー、為替ディーラー等で、グラフィクスボードはいらないが、4画面表示が必要な人向けの装備かも知れない」と書いたが、昨今の高速トレーディングで、株価の変動が一定の基準を超えた場合に瞬時に取引命令を出すというような取引の場合には、ひょっとしたらグラフィクスボードによる高速表示も必要なのかも知れない。なんだかシューティングゲームみたいだ。だが、そのようなケースはプログラムでやってしまうか?等と門外漢の妄想
■ お次は御本尊CPU – intel core i5 13600K
ばーん、泣く子も黙るintel core i5 13600K!(黙らないか)。第13世代のintel processorでは中の上クラス(個人の感想です)
パッケージを開けて手に持ってみたが、体積のわりにずっしりと来た。かといって巷で言われているように、壊れたら文鎮にできるかと言うと、そこまでは重くない。しかし、今回買ったパーツの中では重量当たりコストは断トツであろう。昔からの(硬派の)PCユーザの私にとって、CPUは何にもまして大事なご本尊様である。80286, 386SX, DX, 486SX, DXとその性能の進化を崇め奉って来たが、現在はゲーム、仮想通貨マイニング、Deep learning等の派手な分野でグラフィックスボードが脚光を浴びて、下手をするとCPU以上の費用がかかることもあるようだ。時代の変化を思う。ともあれ、この記念切手大の面積から125Wの熱が放出される。あまつさえ夏は冷房の効きの悪い部屋で私と共に働いてもらうので、Over clockはしないものの、このK付きモデルの耐久性には期待がかかる。現行のcore i5 3570Kも良く頑張ってくれた。感謝
■ メモリ – CFD Standard DDR4 PC4-25600 CL22 8GBx2
これについては既に掲載しているのでこちら を参照
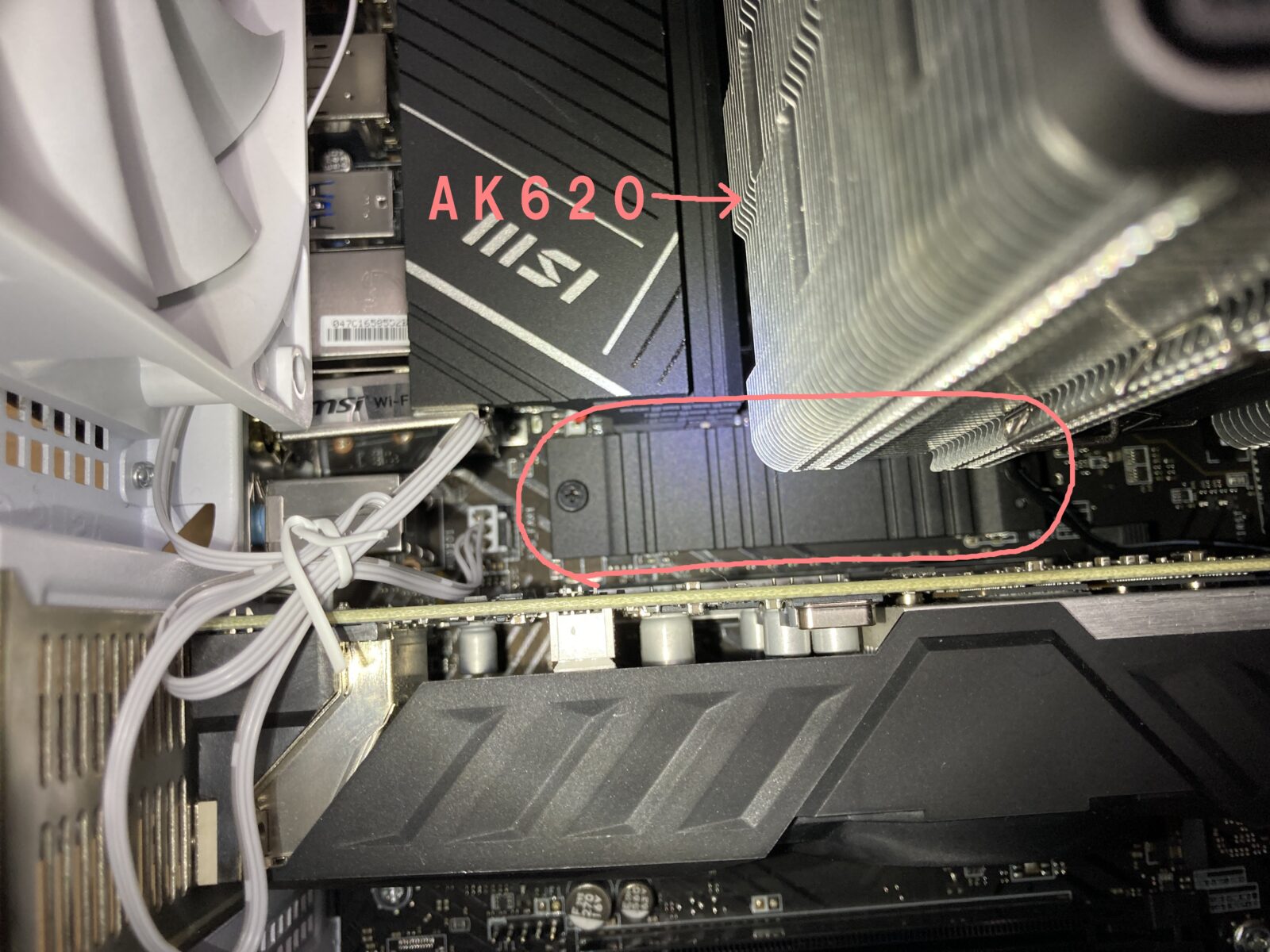
■ CPUクーラ – Deepcool AK620
CPUにつられて買ったのがこのクーラ、最近有名なDeepcoolのAKシリーズの上位モデル。TDP125WのCPUの爆熱を一手に引き受けてもらうべく期待が高まる。
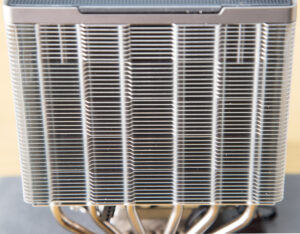
この存在感。デュアルフィン、デュアルファン。この下のクラスにAK500と言うモデルがあり、これは放熱フィンは一つであるのに対してファンが入り口と出口の両方にあり、言うなければプッシュプル構成なのだが、いろいろな記事を読んでみると、ファンの数を増しただけの効果は見込めないようだ。他のメーカのファンでも、ファンを追加して試してみたものがいくつかあったが、同様に、ファンを増やしても効果は薄いようだ。だが、ファンと同時にフィンも増やすと効果が著しく増すようた。と言うことで、AK500の価格差は1.000円しかなかったので、迷わず選択。ただし、このクーラは背が高いので、ケースを選ぶ。下手なものを選ぶとクーラの頭がケースの側板に当たって泣きを見るので注意が必要
AKシリーズときたら放熱フィンの市松模様に触れないわけには行かない。写真がうまく撮れないが、この幾何学模様が放熱にどのような効果があるのか興味があるところだ
■ 電源装置 – Deepcool PK550D
当初は現行の電源を流用しようとしていたが、今回買ったMother boardにはCPU用電源ケーブルが不足しているので、新たに買うことになったもの。最近の電源装置は、パソコンケース内の見栄えを良くするために色が白かったり、プラグイン式のケーブルを採用したりするものも多いが、私はそういうことは一切気にしない硬派なので、ケーブルもじゃもじゃの物を買った。前の記事で書いたように、電源容量の計算をミスって、若干パワー不足気味(将来)だ。返品交換も考えたが、気が付いた時は既にメーカのシュリンクパッケージを破いてしまった後なので、覚悟を決めて使って行くことにする
昔のようなカラフルなコードではない。ケーブルがフラットなのは、今どきのケースの中を取り回して行くうえでメリットがあるのだろうか
パッケージの裏側に薄い字で細かく能書きが書いてある。私には読めない。デザイン性を優先しているのだろうが、ユニバーサルデザインとは言い難い
■ ケース – ASUS Prime AP201 White
自慢しているわけではないが硬派の私は20世紀末にPCを買って以来、ケースは白を使っている。あの頃では、逆に黒系統のケースと言うのは記憶にない位少なかった。それで連綿とケースを変えるときは白/ベージュ系を選んで来ている。実家の母用にDellの出来合いのPCを買った例外はあるが。今回も白のケースを選択した。また、これまでATXのフォームファクターのMother boardだったが、そこまでの拡張性は必要とせず、また置き場所(特に高さ方向)の制約があったので、Micro ATXのケースとした。当初IN WINのA3と言うケースも候補だったが、格好が良いが、3.5インチのストレージの収容数が少なく、スイッチやUSBのアクセスが上からだったので迷っているうちに軒並み在庫切れとなったため、並行して考えていたこのケースとなった次第。もっと前は別の5.25インチベイを備えた静音型のケースも考えていたが、その変節については前の記事に書いた。幅205mm 高さ350mm 奥行460mm、体積33.0ℓでコンパクトであるが若干奥行が長いケース
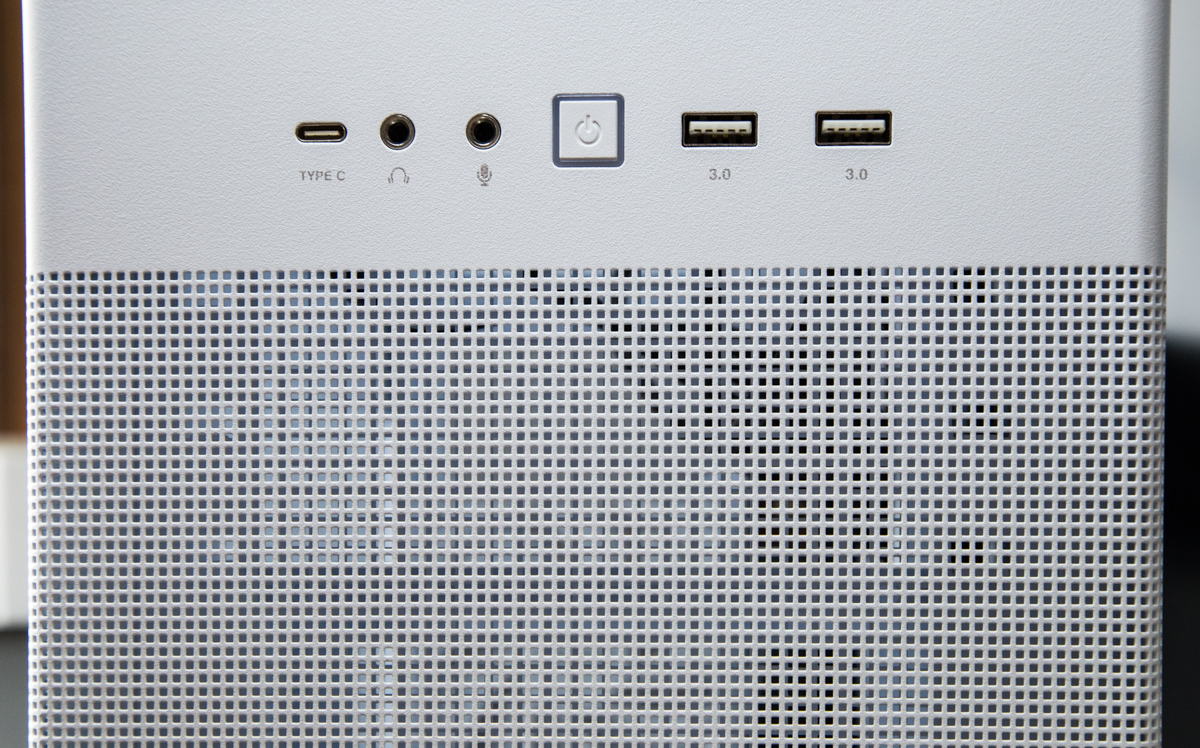
前面パネル上部。スイッチ、USBコネクタに前からアクセスできるのが良い。上面に設置されているものが多いが、上方向に隙間がない設置条件だと辛い。前、左右、上面のパネルにはこのような小さい穴があけられており、通風を最大限考慮している。硬派の私が気に入らないのはHDDアクセスランプがないこと。これは前の記事で書いたように、別途部品を取り付けて対応する
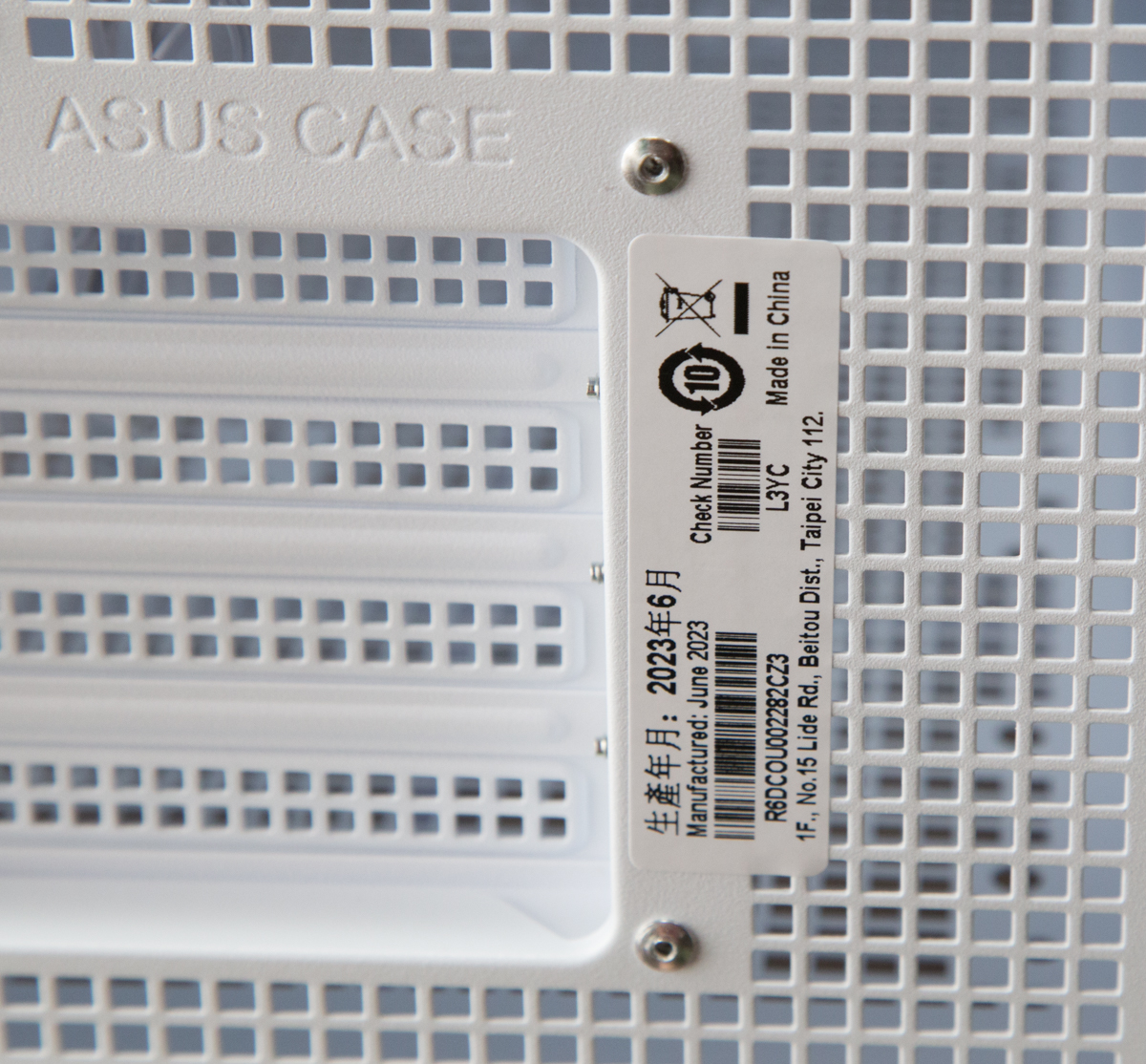
左 : 今年(2023年)の6月に製造されたもの
右 : 側板は本体側のへこみに指を入れて引きはがすようにすると外れる。ジュラコンキャッチと言うものらしいが、私は開閉の回数が増えると摩耗してバカにならないかが心配。私は硬派なので、ネジ上等!なのだ
左 : 幸いなことに、このケースの拡張スロットカバーはネジ止め式で、折り取るタイプではなかった
右 : 前面パネルを後ろから覗いたところ。画面左3/1のところに四角い穴が3つ縦に空いており、その下の四角い物体は電源装置のブラケットである。このケースは電源装置をケース前方に、縦に取り付けるようになっていて、その高さを選べるようになっている。長いグラフィックスボードを付ける時や、3.5インチHDDを3台取り付けたい場合は干渉を避けるために上に取り付け、天面に水冷ラジエータのファンを取り付けたいときは下にする等の調整ができるようになっている
左 : Mother board取り付け面のスタンドオフ。写真では見難いがI/Mの刻印があり、MiniI TX/Micro ATXの区別がつくようになっている
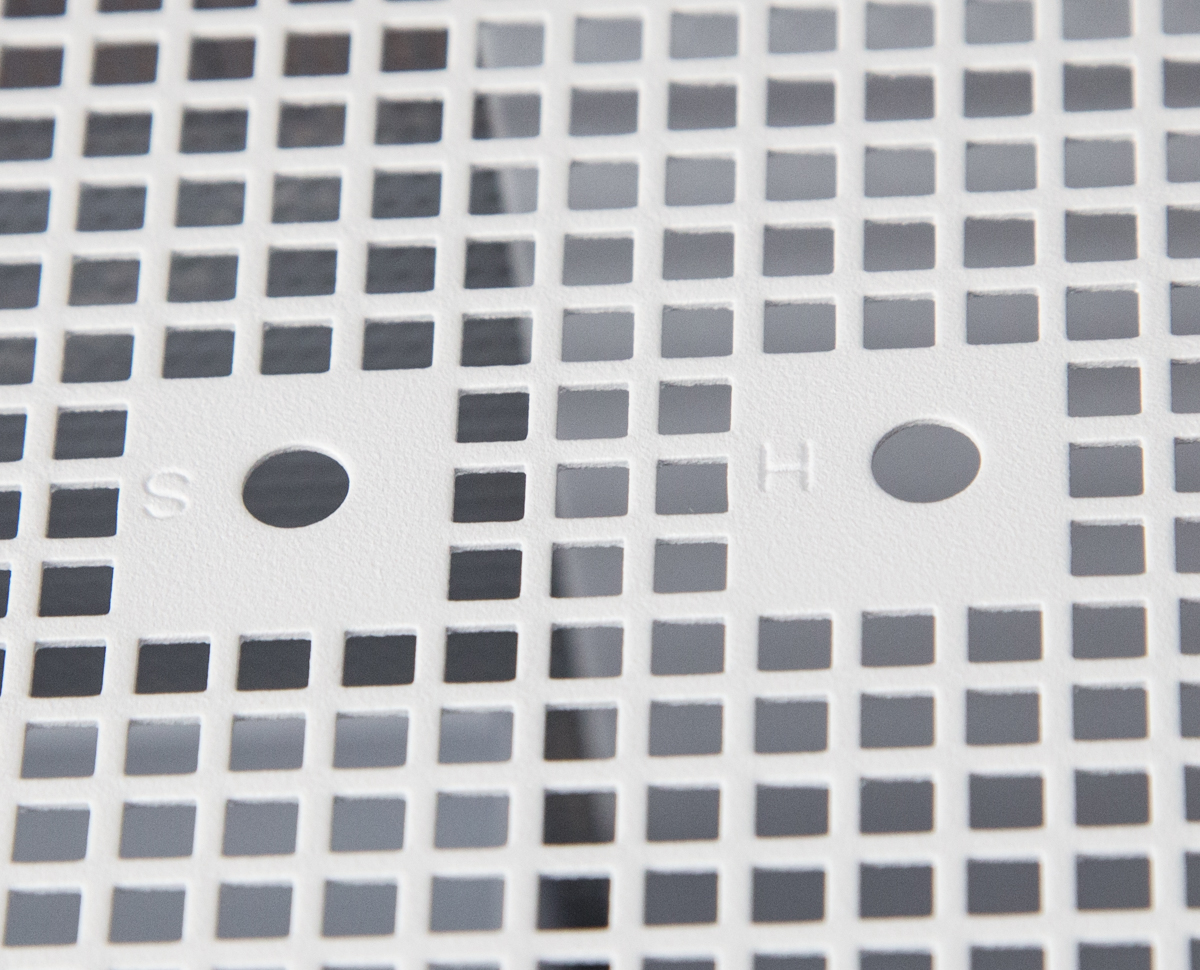
右 : 底面のストレージ取り付け用の穴。Sは2.5in. SSD、HDDは3.5in. HDD用の穴であることを示している。いずれも親切だ。こういう心遣いは硬派/軟派共通にうれしいものだ。因みにこのケースは最大で2.5in.が1台、3.5in.が3台まで固定できるようになっているので、HDDを3台で運用している硬派である私の構成にぴったりだったのもこれを選択した要因の一つ。
6面全部がパンチ穴の開いた板で囲われているので剛性について心配していたが、特に問題はなさそうだ
私は硬派なのでごてごてと無駄な曲線、角、光物、ロゴで飾られたケースは好きではない。このケースは前面にはジャック類の表示が控えめに書かれているだけで他には何の文字も書かれていない。右側面にさりげなくシリーズ名(型番ですらない)の文字列が書かれているだけである。右の写真に至っては左側板を外さなければ見えない場所にある。この潔さ、奥ゆかしさが硬派の心に響く。押しも押されぬASUSの自信と余裕の表れと感じられないこともない
■ おまけ – HDDアクセスLED
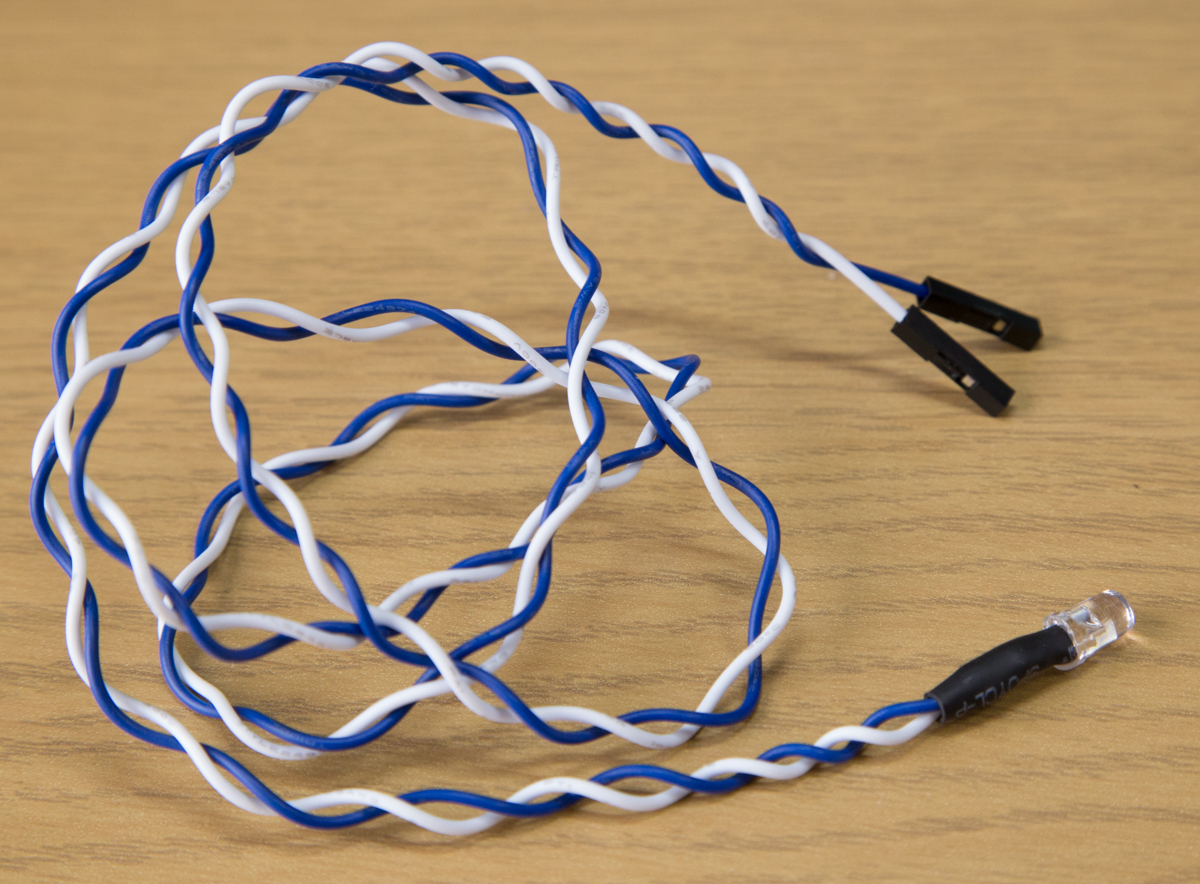
ケースで唯一不満だったのが、HDDアクセスランプがないこと。しかし捜したところ、やりようはあるもので、下のような部品が売られていたので、買ってみた
良く見てみると、Mothe boardのピンに差すソケット、リード線、LEDで構成されているので、実は硬派の私には手持ちの電子工作の部品でできてしまったのではないか疑惑があるが、LEDの定格は不明なので、このまま使おう。幸いケースの板はすべてパンチ穴が開いているので、ケース内のどこかにこのLEDを貼り付けておけば、外側からでも状況を知ることができるだろう
2023/09/08


















































 ■ nNEZOU Portal
■ nNEZOU Portal ■ んねブラ(nNEBLUR)
■ んねブラ(nNEBLUR) ■ People I met in India
■ People I met in India ■ Murphy's Lawカレンダー
■ Murphy's Lawカレンダー ■ twitter (旧 X)(@nnezou)
■ twitter (旧 X)(@nnezou)
 ■ instagram (nnezou)
■ instagram (nnezou)

{kind=link}