人生ゲームルーレット再来 – 再構築編
Raspberry Pi Picoによるしょうもないシステムの専用機化の第二弾として、Raspberry Pi 4Bで作った人生ゲームのルーレットを、専用機化するプロジェクト。前回より少し機能を追加してブレッドボード上に組み上げた
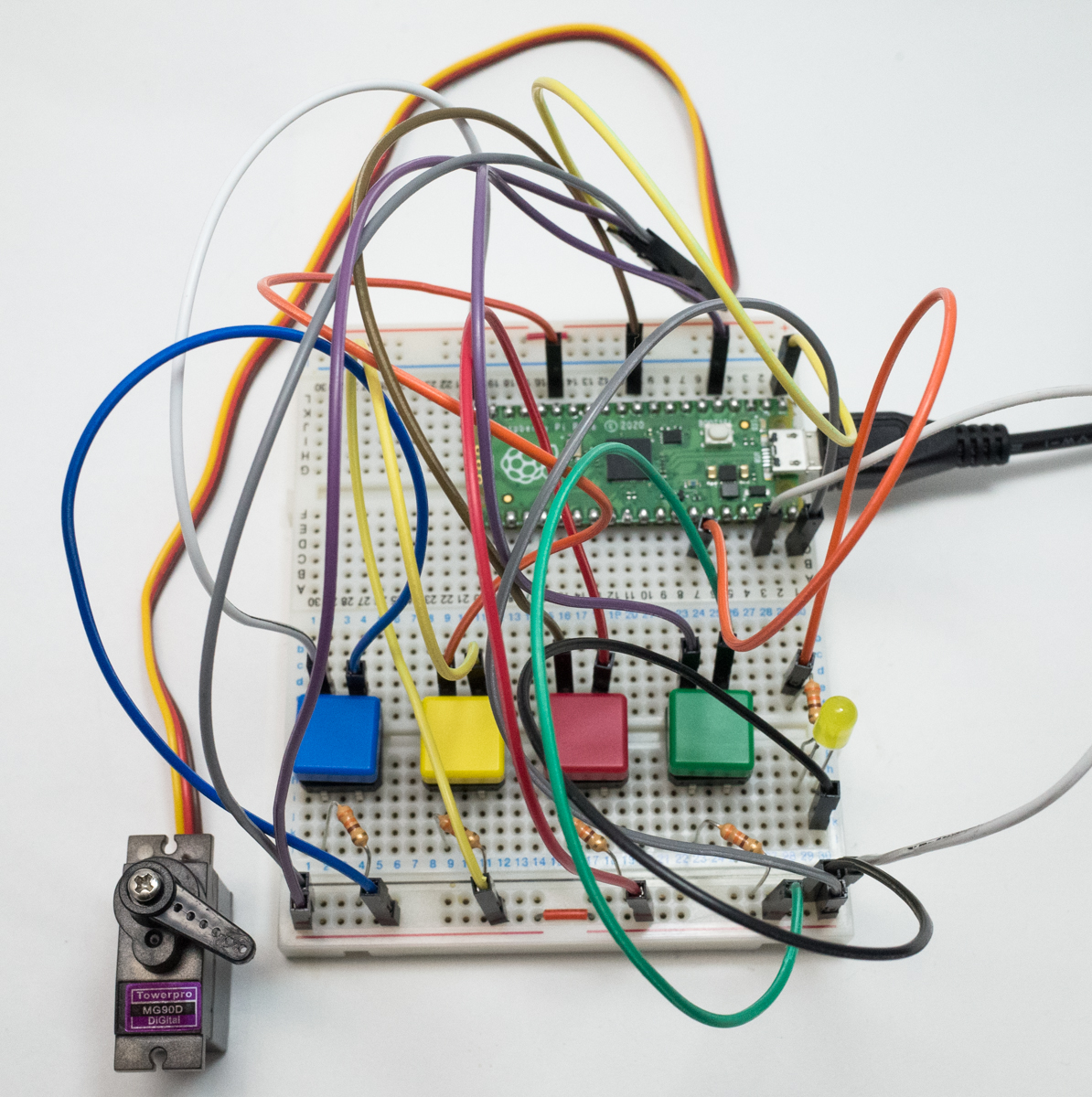
起動ボタンを追加した。予め参加者が好きな色を決めて専用に使うも良し、そういう取り決めもなく自由にその時の気分で押しても良し。サーボモータが動いている間はLEDが点灯するようにもした。以前買っていたRGB LEDを使って押されたボタンの色で光るようにしようと思ったが、見つからないのでおとなしく手持ちの黄色のLEDにした
ゲームを始めるにあたって、それぞれのボタンには秘密の隠し味が仕込んであって目の出方が微妙に違い、参加者がどのようなコースを選んだか、また何を狙うかによってその結果に差が出て来るかもしれない等と能書きをコクのも趣が増して良いかも知れない(プログラムを見れば内部のロジックは全く同じなのは一目瞭然だけどな)
リード線が林立して非常に複雑そうに見え、自分にして見れば大したことをやったという感覚を覚える。それは良い、達成感を持つのは精神衛生上非常に良いことである。しかし、しみじみと考えると、PicoのGPIO端子とGNDをプルアップ(ダウン?)抵抗で繋いで → 電源と繋げるスイッチ → GNDの回路を4つと、GPIO → 電流制限抵抗 → LED → GNDの回路があるだけで、使っている抵抗もちゃんと計算したものではなく、とりあえず唸るほどある330Ωの抵抗を場当たり的に使っていたり、実はそれほど大した回路ではないということに思いを致すことも人生で大切なことである。
※(ここまで書いてきて、ソースコードでGPIOピンの定義でPULL-UPオプションを指定していることに気がついて混乱して来た。本当にこのままで良いのだろうか…動いているからこの場では良しとすることにする)
以下はリスク対策のためのソース(Micropython)
# ボタンを押すとサーボーモータがランダムな値を示し、作動中はLEDが点灯
# Raspberry Pi Picoで作動
# MycroPython上で稼働
# Servo Motor GP0
# 緑GP3 赤GP7 黄GP11 青GP15
# LED GP28
from machine import Pin
import time
import math
import random
pin28 = machine.Pin(28, machine.Pin.OUT)
def servorandom_dice_Pico():
# 可動範囲は0°~約120°(Duty比で2300~7530)
# 1~10のサイコロの目をサーボモータで表示する
pin0 = machine.Pin(0, machine.Pin.OUT)
servo = machine.PWM(pin0)
servo.freq(50)
m = random.randint (6, 10)
n = 1
while n <= m:
dice = random.randint (0, 9)
pulse = (523 * dice + 2300)
servo.duty_u16(pulse)
time.sleep (0.3)
n += 1
n = 1
while True:
pin = machine.Pin(3)
pin = machine.Pin(3, machine.Pin.IN,machine.Pin.PULL_UP)
if pin.value():
pin28.value(1)
servorandom_dice_Pico()
pin28.value(0)
pin = machine.Pin(7)
pin = machine.Pin(7, machine.Pin.IN,machine.Pin.PULL_UP)
print ("Pin5 (R) : ", pin.value())
if pin.value():
pin28.value(1)
servorandom_dice_Pico()
pin28.value(0)
pin = machine.Pin(11)
pin = machine.Pin(11, machine.Pin.IN,machine.Pin.PULL_UP)
print ("Pin10(Y) : ", pin.value())
if pin.value():
pin28.value(1)
servorandom_dice_Pico()
pin28.value(0)
pin = machine.Pin(15)
pin = machine.Pin(15, machine.Pin.IN,machine.Pin.PULL_UP)
print ("Pin15(B) : ", pin.value())
if pin.value():
pin28.value(1)
servorandom_dice_Pico()
pin28.value(0)
print (n ,"---- ")
n += 1
time.sleep (.2)
MicropythonとPythonではライブラリの提供の内容が違うのか?よくわからないながらコーディングをした。途中で関数の定義と言う、私にとっては大きな飛躍を遂げた(すぐ忘れるけどな)。電子回路でプルアップという考え方にも触れた。これで一つの山を越えた。あとは使い方を考えて基板と筐体をどうやって作るかだ
2021/09/12
んねぞう

 ■ nNEZOU Portal
■ nNEZOU Portal ■ んねブラ(nNEBLUR)
■ んねブラ(nNEBLUR) ■ People I met in India
■ People I met in India ■ Murphy's Lawカレンダー
■ Murphy's Lawカレンダー ■ twitter (旧 X)(@nnezou)
■ twitter (旧 X)(@nnezou)
 ■ instagram (nnezou)
■ instagram (nnezou)
 ■ 文芸同人誌 澪(HP)
■ 文芸同人誌 澪(HP)