PC ひと昔前との比較
今のPCがWindows11のサポート外であることから、今、PCの更新をしたらどうなるか、というシミュレーションをしている。前回CPUを交換して以来10年間のギャップがある。その時の記憶と今を対比して見る
一つは今、AMDが頑張っていて、コストパフォーマンスがIntelを追い抜いているということ。昔はAMDは安いけど性能はそれなり、という印象だったが、最近はとても元気が良いようだ。ただし、昨年第12世代のCoreシリーズが出て、少し事情が変わっているようだが
もう一つはCPUの水冷化が一般化してきていること。昔は一部の物好きが、手作りで熱帯魚鑑賞用の部品を使って工夫していて、失敗すると大惨事、と言う感じだったが、今は簡易水冷システムとして、普通に製品として使われている。それというのも昨今はCPUの性能が上がって来つつ、発熱も増大しているためなのだろう。水冷とはいかないまでも、ケースも冷却のための気流に気を使っている度合いが大きくなっているように感じる。昔は鉄板で囲われていたものがほとんどだったが、パンチ穴の開いている板でできていたり、メッシュが張ってあったり、至るところにファンを付けられるようになっていたりする。また、光り物が突如現れてきていて、Motherboardやメモリまでも光らせるのには驚いた。ケースも脇板がガラス製のものがあったり、まるでデコトラみたいだ
キーコンポーネントが寿命を迎える等、特に必要がない限り何の情報収集もしていないので、1 decade毎に情報収集をしているとその違いが際立って見えて面白い
それとは逆に、ATX規格が残っていて、Motherboard、電源のサイズやコネクタの仕様が維持されているのは、CPUが486の時からAT互換機を使っている私から見ると素晴らしいと思う
今回の情報収集にあたって、YouTubeによる動画には大変お世話になった。これもまた以前とは全く違う情報発信の形で若いYouTuberの活動には目を見張るものがあり、感謝に堪えない
敢えて言わせてもらいたいことがある。若い人達の英語の読み方だ。Intelの第12世代のアーキテクチャはAlder lakeというそうだが、私の感覚では多分オルダーレイクと発音する。また、AMDのグラフィックスはRadeonと表記されるが私はレイディオンと発音する。それはお前の好みだろと思う向きはWebで調べて見てほしい。私が見たYouTubeのコンテンツでは皆アルダーレイク、ラディオンと発音されている。みんな若い人達なのだが、これが非常に気になる。これからもますます国際化の波に洗われて行く日本で、国内のことだけを意識するのではなく、直接海外の情報源に積極的に関わって行かないと日本の存在感はますます失われて行く、そうならないためにも国内の殻に留まることなく、若い人達には積極的に外に向かってほしい、そのためにはヘボン式ではなく世界的に通用する発音を意識して欲しいと思う
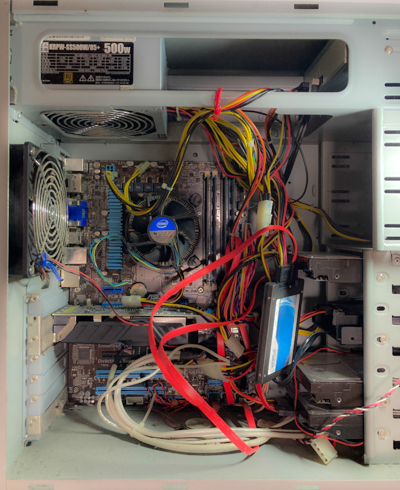
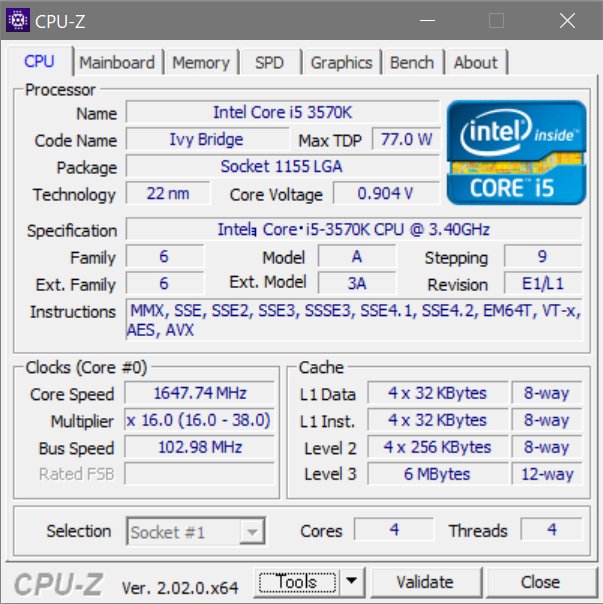
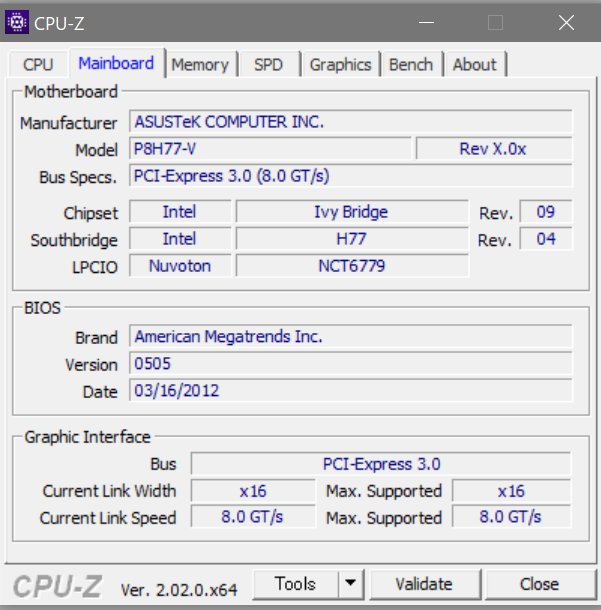
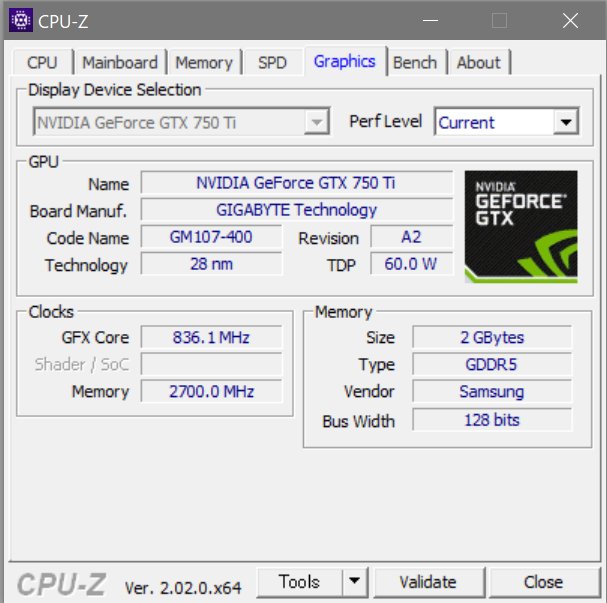
話を戻して、今私が自分のPCをアップグレードするとしたら、今のシステム(Core i5 第3世代)では Windows 11に非適応なので、CPU, Motherboardから変えなければならない。ゲームはしないが、写真の現像はするし、ひょっとして動画編集にも手を伸ばすかも知れない。これで今後10年間は使えるもの、省スペースかつ予算は奥さんに事前申請している10万円という枠で考えると、Mini ITXでケース、Motherboard、Memory、電源を更新、CPUはIntel core i5 12600KまたはIntel Core i7 12700F、後者の場合はグラフィックスボードは今使っているGTX750Tiを流用、という形になるかな、と皮算用している
最長で引っ張ってWIndows10は2025年10月までは使えるようだ。その頃はどうなっているかわからないので、その時はその時で考えるとして、今時点の心積り、と言うよりは考えの纏まらなさを残しておく
2022/10/30
んねぞう













 ■ nNEZOU Portal
■ nNEZOU Portal ■ んねブラ(nNEBLUR)
■ んねブラ(nNEBLUR) ■ People I met in India
■ People I met in India ■ Murphy's Lawカレンダー
■ Murphy's Lawカレンダー ■ twitter (旧 X)(@nnezou)
■ twitter (旧 X)(@nnezou)
 ■ instagram (nnezou)
■ instagram (nnezou)