驚愕の250ドルノートPC
このところ自分のデスクトップPCの10年ぶりの更新計画の妄想を楽しんでいる。重い3Dゲームはしないし、写真の現像、動画編集には昔買ったソフト、或いはフリーソフトを使っているのだが、調べた限りこれらを使う分にはグラフィックボードは機能しないようなので、CPUにコストを全振りした形で考えており、う~む、今だったら第13世代Core i 7かな、等と考えている。
YouTubeの情報収集もおさおさ怠りなく行っているうちに、デスクトップではないが、Intelの新しいCPUを搭載した格安ノートPCの動画が目に留まった。

製品HPより
私は 会社の業務の一環として、ある団体の主催するセミナーで講師まがいのことを務めさせて頂いている。このセミナーでは、その団体の拠点に社用のノートPCを持って行き、オンラインミーティングツールを通じてでセッションを進めて行くのだが、今後会社を退職した際に、仮に講師を個人として委託を受けた際にどうしようか、ということが頭に引っかかっていた。私の個人PC環境はデスクトップで、4Kモニタその他周辺機器をいろいろ繋いで使っており、移動した先でごりごり重作業をするつもりもないので、非常用としてCerelon N4020を搭載した2 in 1ノートを持っているのみである。しかしこのノートPCを上記の業務のために、オンラインミーティングツールで接続しながらOfficeソフトを動かして、というには明らかに力が不足しており、どうしようかと思っていた
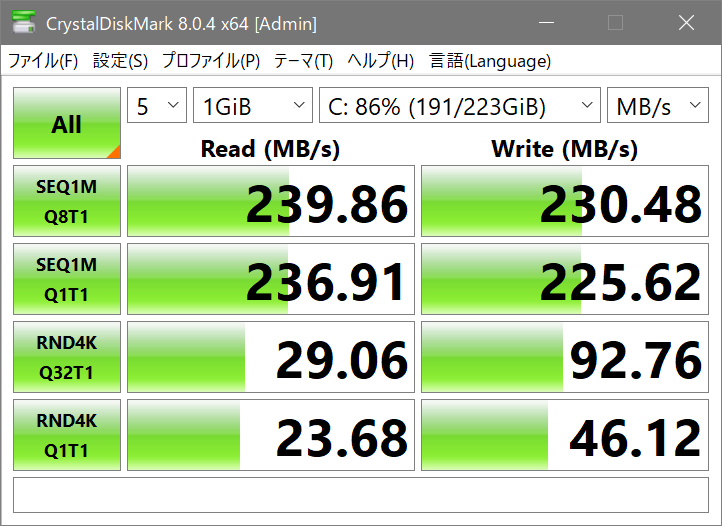
そのような中でYouTubeでIntel N100という、Cerelonの系譜を継ぐ、Core iシリーズで言う第12世代(Alder Lake)のCPUを搭載したノートPCの紹介記事があった。Cinebench R23のMulti coreのスコアが2,906と、今私が持っているCerelon N4020の720はおろかメインのCore i 5 3570Kの2,645も軽く凌駕しているのに驚いた
今使っている社用PCは第7世代のCore i 5であり、暗号化、VPN、その他監視ソフトがバックグラウンドで動いていることもあるのだろうが、オンラインミーティングツールでリモートの講義を行うには多少辛い面がある。もしこれらのOverheadの制約がなくなったとしたら、このN100はどの程度の使い勝手になるのだろうか、興味がある。価格は249USD
一つ、今わかっている問題は、キーボードにかなの刻印がないことだ(なぜこれが問題なのかはこちら)
製品URL(安心のためURLは埋め込みません)
GemiBook XPro 14 inch | Intel 12th Alder- N100 | Intel® UHD Graphics | WIFI6+BT5.2 | 8GB LPDDR5 + 256GB SSD
https://store.chuwi.com/products/gemibook-xpro?sca_ref=552608.VMa89q1Iu6&utm_source=fb&utm_medium=social&utm_campaign=12312
2023/04/23
んねぞう












 ■ nNEZOU Portal
■ nNEZOU Portal ■ んねブラ(nNEBLUR)
■ んねブラ(nNEBLUR) ■ People I met in India
■ People I met in India ■ Murphy's Lawカレンダー
■ Murphy's Lawカレンダー ■ twitter (旧 X)(@nnezou)
■ twitter (旧 X)(@nnezou)
 ■ instagram (nnezou)
■ instagram (nnezou)