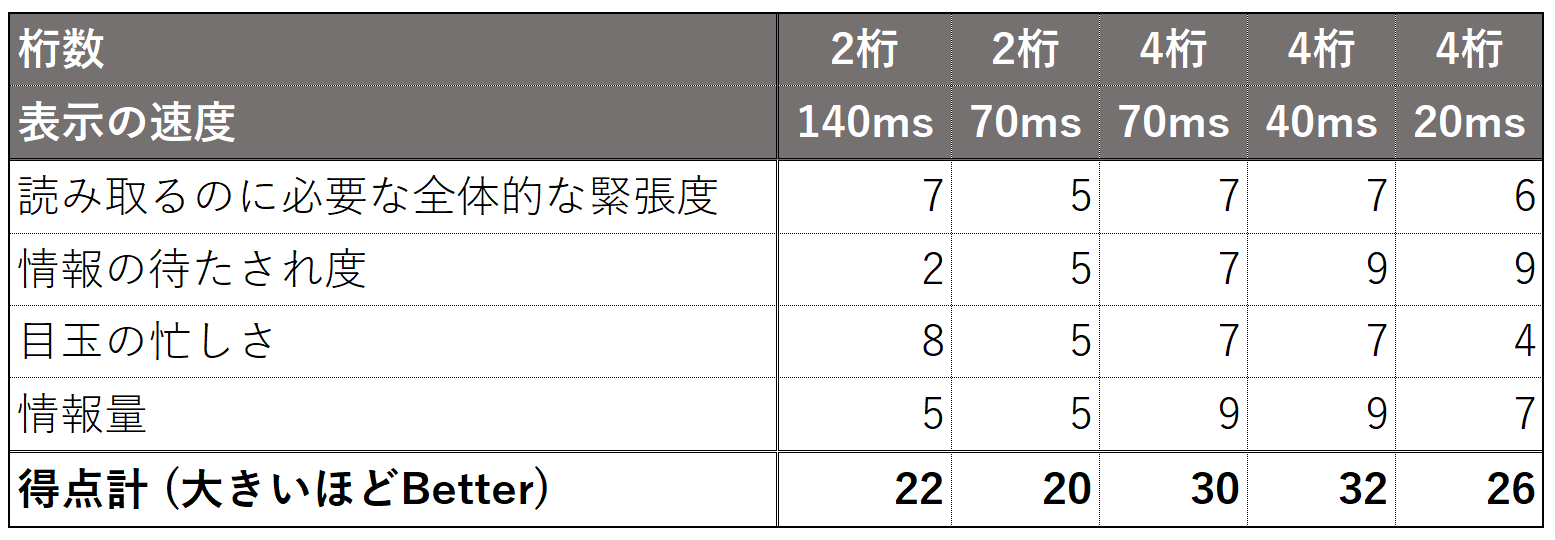
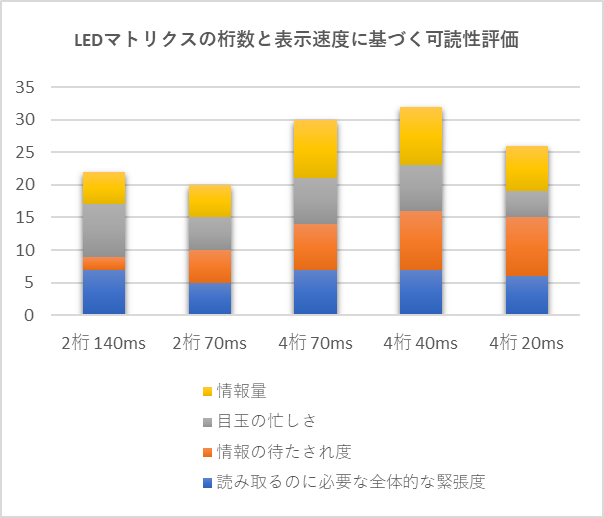
先だって、8ドットLEDマトリクスを使った電光掲示板の復活を果たしたのに気を良くして、この拡張を考えた。8ドットLEDマトリクスが2つ連結されているのでは、いささか文字の読み取りに神経を集中させる必要がある。これは個人差があるのだろうが、右から左に流れる、8ドットの文字を認識して、記憶し、その次に現れる文字を認識して、単語として構成して意味を取るという作業は、なかなかに集中を強制されるものである。仮に、これが電車の中の案内表示に使われたら、乗り間違い、降り間違いで発狂する人が出る可能性もあると思われる。これを解消するには – ① 表示のスピードを遅くする、 ② 表示の桁数を増やす – の2通りが考えられる
① 読み取るのに必要な全体的な緊張度 ② 情報の待たされ度 ③ 目玉の忙しさ → 流れて行く文字を文字として読み取るのに必要な目の移動量と速さ。これは流れるスピードが主に関係するだろう ④ ぱっと目に入って来る情報量 → 2個、4個連結と言う物理的条件の他に、流れて行く文字全体を見て瞬時に把握できる程度
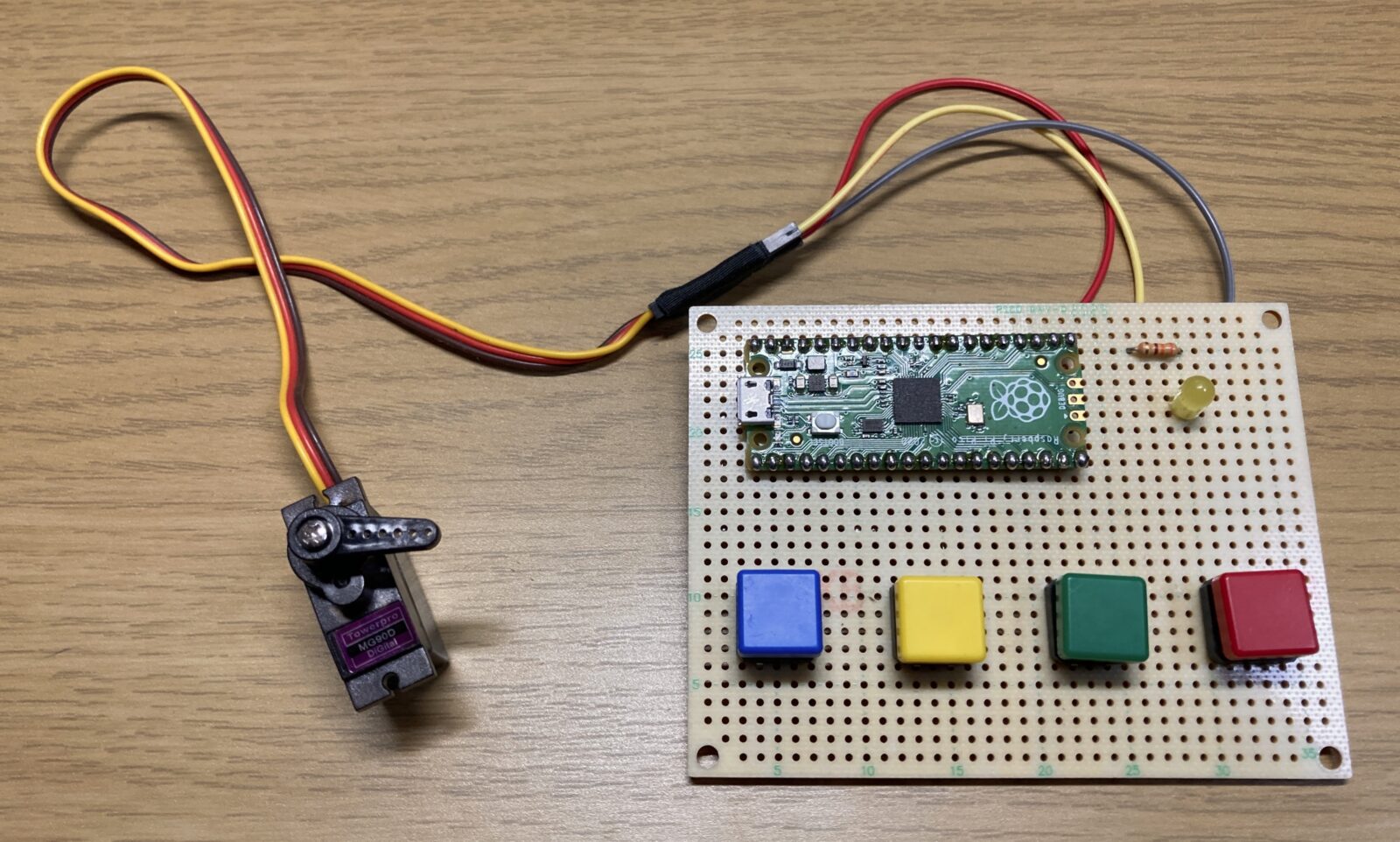
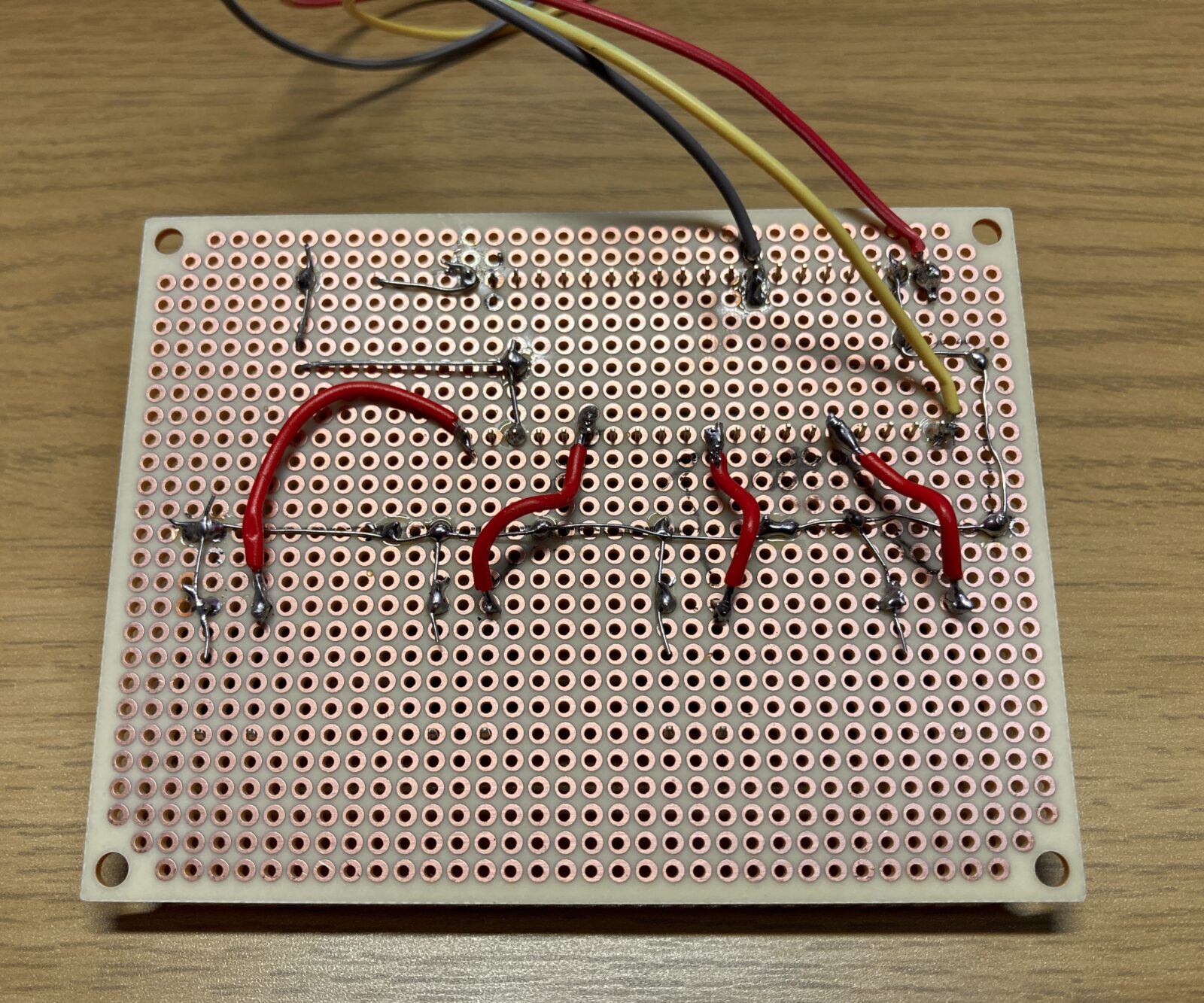
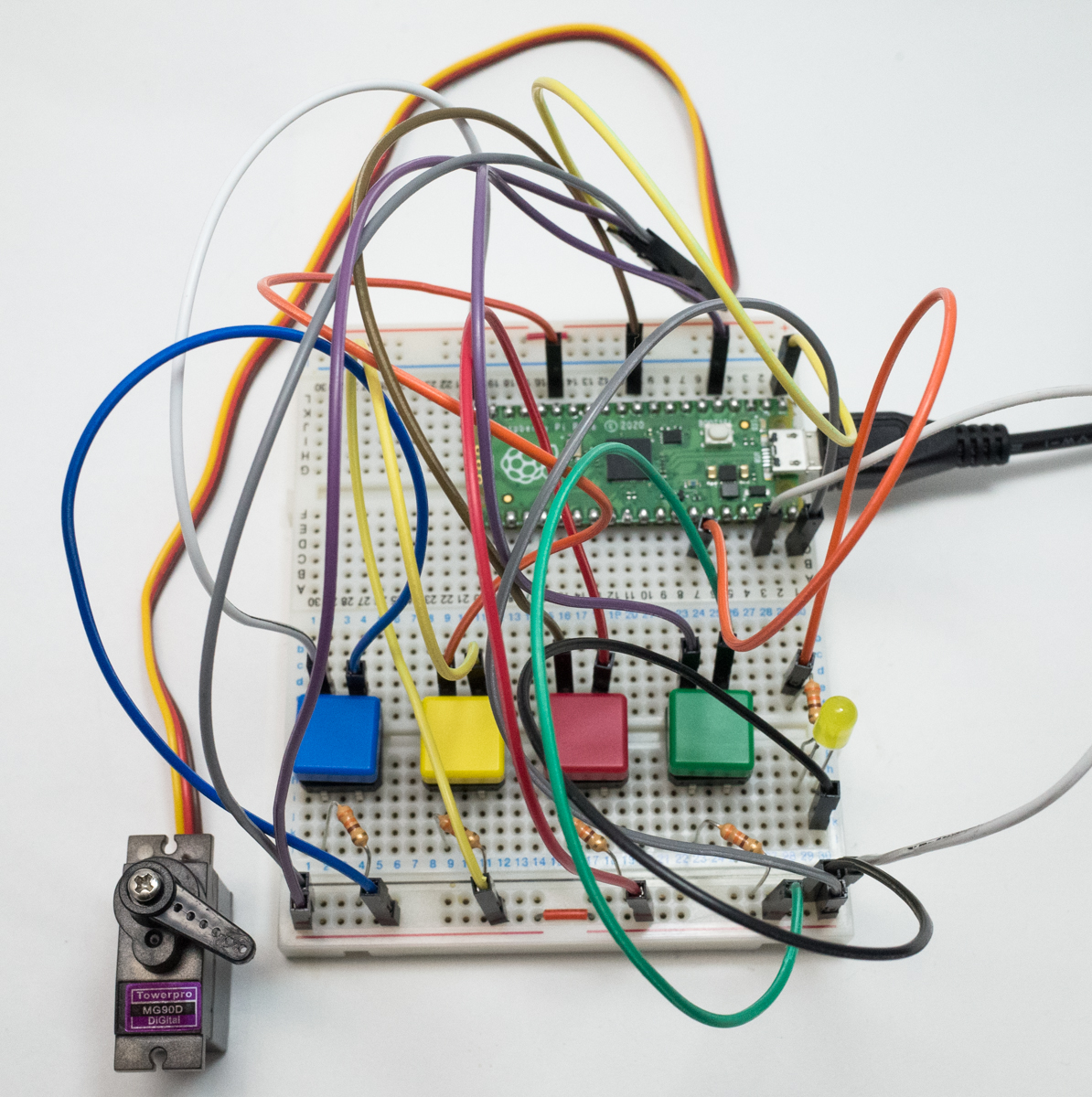
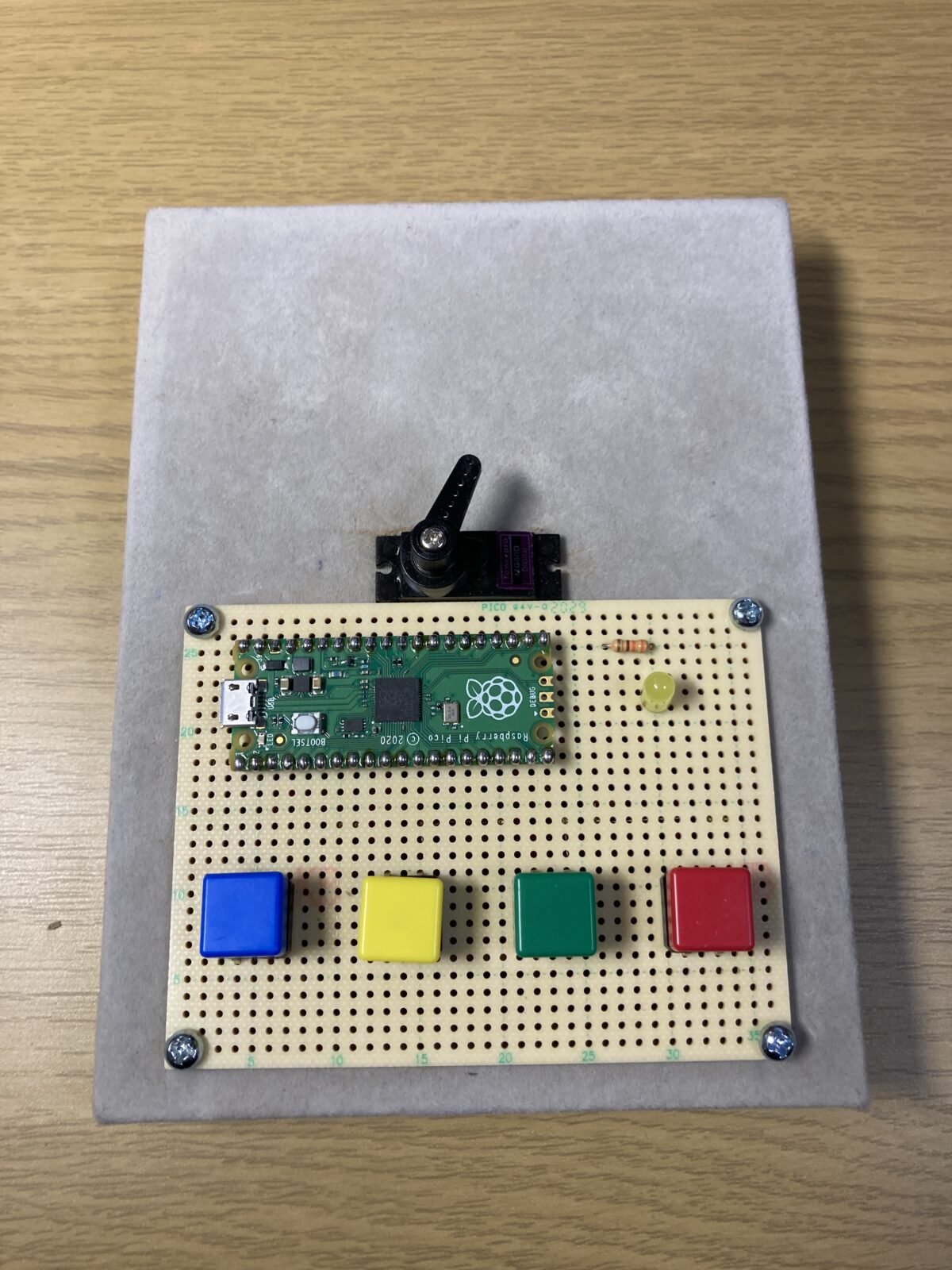
# Roulette_20250304.py : 2025/03/04 Modified # By pushing any of buttons, the dice number (from 1 to 10) is randomly determined and servo motor indicates its value. A LED lights during the process. # Runs on Raspberry Pi Pico. # Developed on Micro Python. # Pin assign -- # Servo Motor : GP0 # For each button: Green GP11, Red GP15, Yellow GP7, Blue GP3 # LED : GP16
from machine import Pin,PWM import time import math import random
先日RaspberryPi Zero 2WをNAS化して喜んでいたのだが、一晩経つと何故かUSBフラッシュメモリのマウントが解除されてしまうことがわかった。原因は不明。それでは困るのでいろいろ試していたのだが、結局下記のような経緯を辿って、ストレージが当初のHDDからUSBメモリ、そしてSSD、SATA-USBアダプタもバスパワー方式から外部電源方式と、本体以外がらりと変わった構成になってしまった
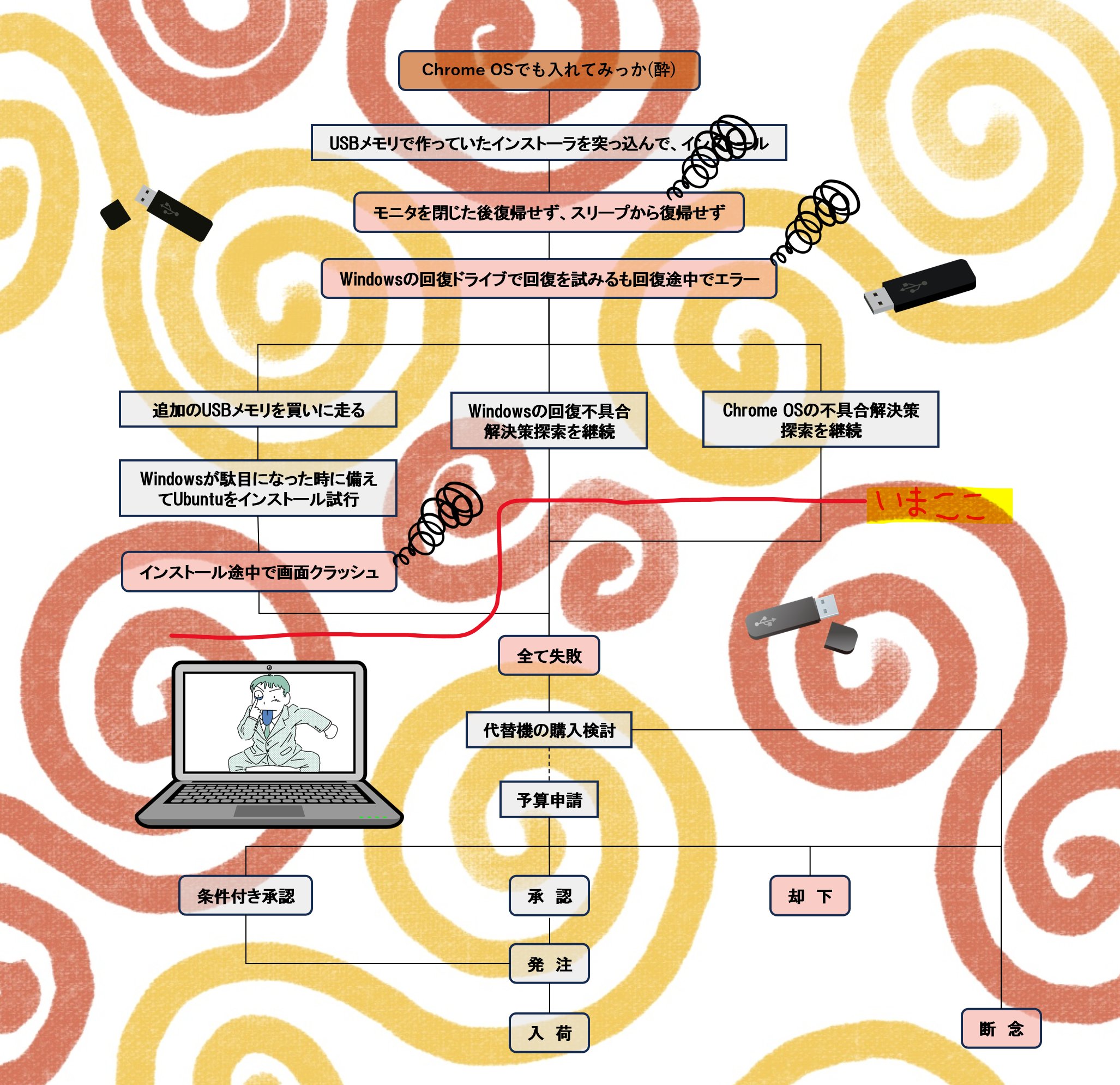
WindowsマシンにもこのOSがインストールできるようになっており、Chrome OS Flexと言う。インストールにあたっては、WindowsのChromeブラウザに拡張機能をインストールし、これを起動してUSBメモリにインストーラを構築して、これを差し込んで起動するようになっている。起動した時は、このままOSをインストールするのか、インストールしないで、環境を試して見るかの選択ができるようになっている。この機能検証を上述のWindowsのサブマシンで行っていた
Chrome OS Flexをインストールしても、スリープから復帰もしないし、モニタをぱたんと閉じてまた開けても画面が表示されないし、だめだこりゃと思って、以前取っておいたWindows回復ドライブを使って回復しようとしたら、回復の途中でエラーになって進まない。いろいろなメニュー、オプションで何度やっても解決できていない
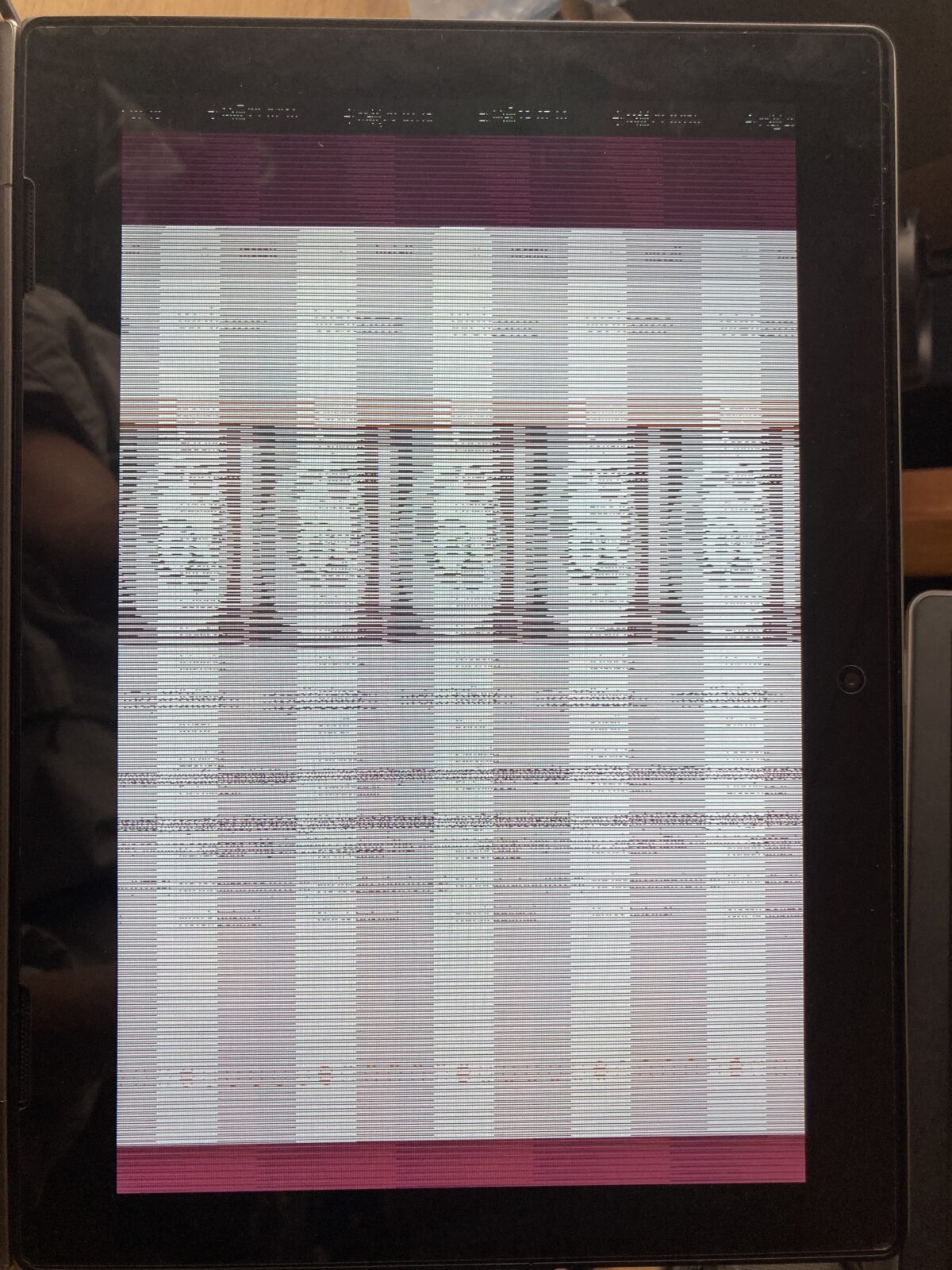
然らばUbuntuでも、と思ってインストールしても画面が乱れて使い物にならず
結局のところ、Windowsの元の環境に戻せず、さりとてChrome OS Flexも中途半端な状態で使い物にならず、もう一つの逃げ道と思っていたUbuntsもがめんがくしゃくしゃで話にならないという八方塞がりの状態だ










 ■ nNEZOU Portal
■ nNEZOU Portal ■ んねブラ(nNEBLUR)
■ んねブラ(nNEBLUR) ■ People I met in India
■ People I met in India ■ Murphy's Lawカレンダー
■ Murphy's Lawカレンダー ■ twitter (旧 X)(@nnezou)
■ twitter (旧 X)(@nnezou)
 ■ instagram (nnezou)
■ instagram (nnezou)
