トラブルは続けてやってくる
- nWFHS
nWFHS (nNezou Work From Home System – んねぞう在宅勤務システム)の主要機能であるRaspberry Pi ZeroによるLED表示ができなくなった。止せば良いのに Pi Zero のアップデートをしたのが悪いらしく、これまでうまく行っていた環境が壊れてしまい、再インストールしても後の祭り。原因を究明する気力もないが、さりとて月曜日からの仕事にないと困るので、下記のように考えた。
LED表示はハードルが高いので、以前ギブアップして取っておいた3.5インチ液晶を表示用として使う。
方法 1 コントロールセンターであるRaspberry Pi 4からZeroにVNC接続して、「仕事中」、「会議中」の旨表示をしたmp4動画ファイルを作成して、vlcプレーヤーで表示させる。
表示できたは良いが、Zero側のCPU負荷が100%に張り付いていて、VNC接続したPi 4側からの停止コマンドを受け付けない。表示を切り替えるためにタスクマネージャーを呼び出してプロセスを停止させる、というなんともダサい恰好になる。→ 断念
方法 2 Windows PCのアニメーション付pptを作成し、Motion GIFで保存し、Zero側で表示させる。pptでGIFを書き出したが、Motion GIFではなかった… → 断念
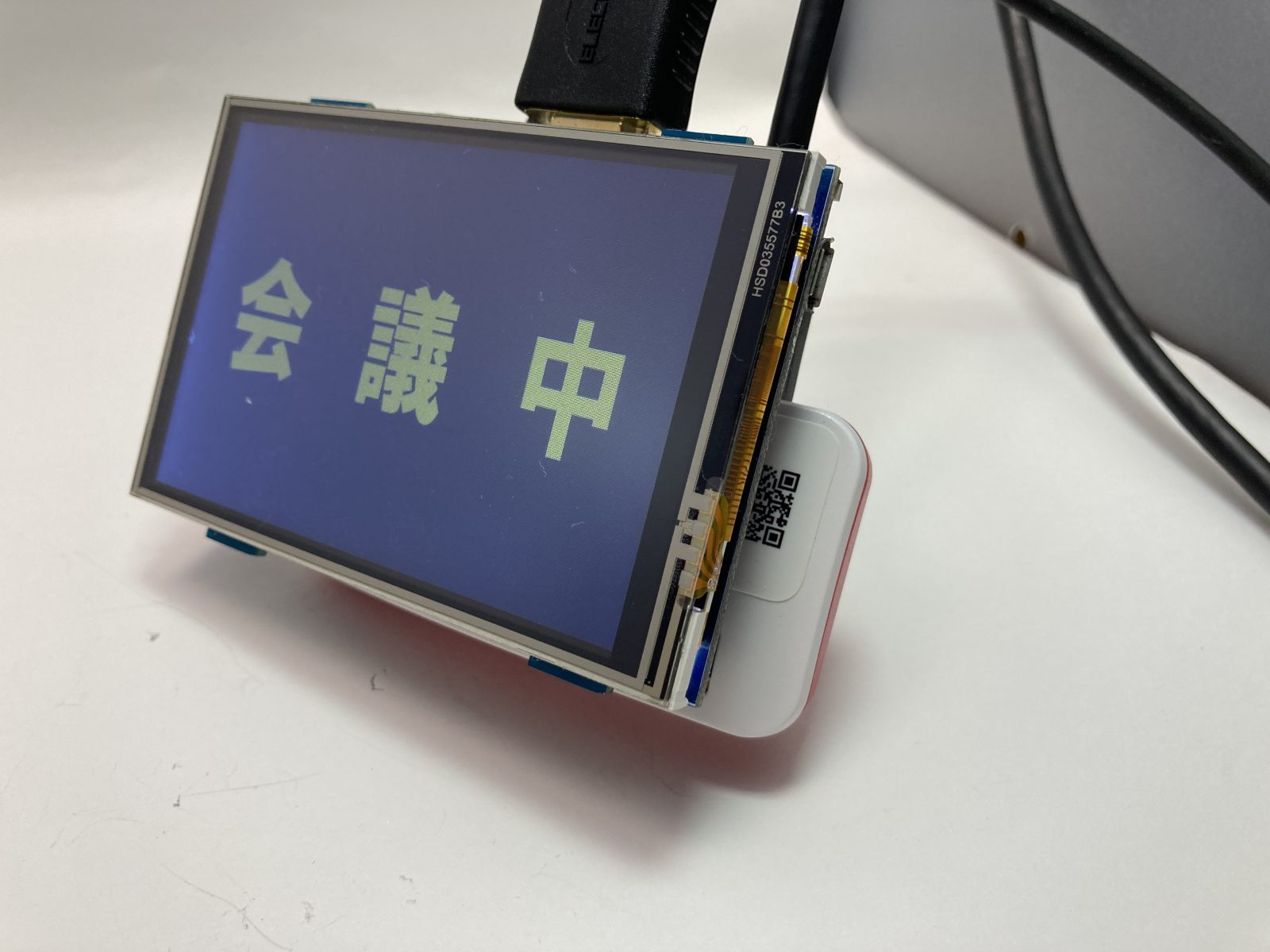
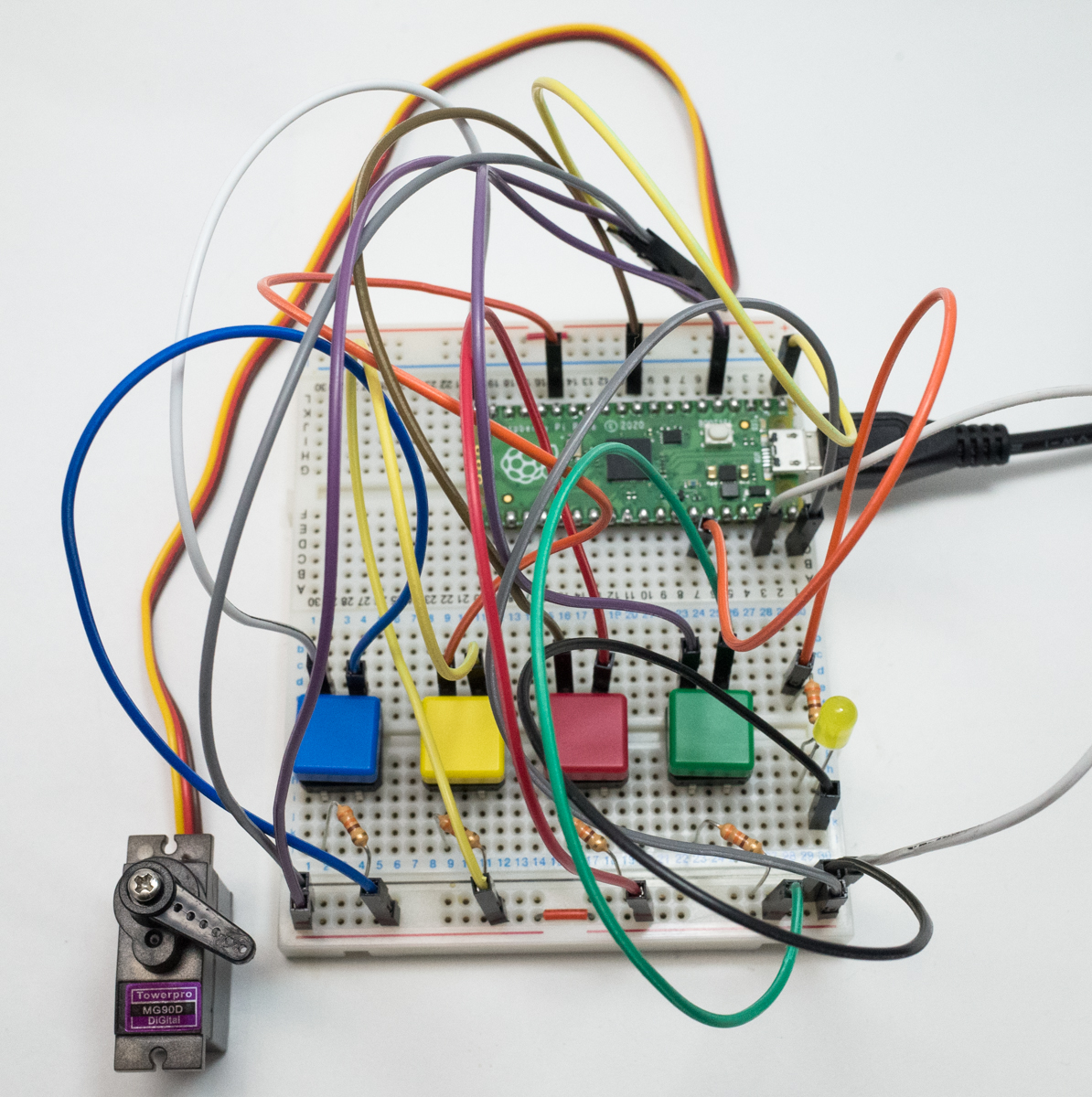
方法3 方法2のpptで作ったものをjpeg化した静止画をZero備え付けのイメージビューワで全画面表示させる → 一番つまらないが、背に腹は代えられないので採用。下の写真参照。Pi 4からのVNC接続だけでは一定時間経過するとスクリーンセーバーが働いて画面が暗くなるので、Picoで作ったMouse JigglerをコントロールセンターのPi 4に接続して、定期的にマウスポインタを1pxずつ動かすことでスクリーンセーバが働かないようにした。こういう本筋でないところで頭を使うことも多い。なんだか電子工作から遠くなってしまったのが悲しい

2. 中華アンプ壊れた
これまで使っていた中華アンプがお亡くなりになった。調べてみたら2017年の8月に3,000円程度で買ったのが4年間保ったことになるので十分元は取れた。それまでの間、故障したと勘違いして買っていて、そのまま保管していた別のアンプLP-2040+というものがあったので交換した。
またいたずら心を出して分解を始めたのだが、前面と裏面のパネルの固定に特殊なねじが使われていて外せないので、本体とパネルの間にマイナスドライバをねじ込んで、パネルを破断させるという暴挙に出た結果が下の写真。

なぜこんなことをしたのかというと、部品を回収して電子工作に使えないかという下心から。基板を引き出してみた
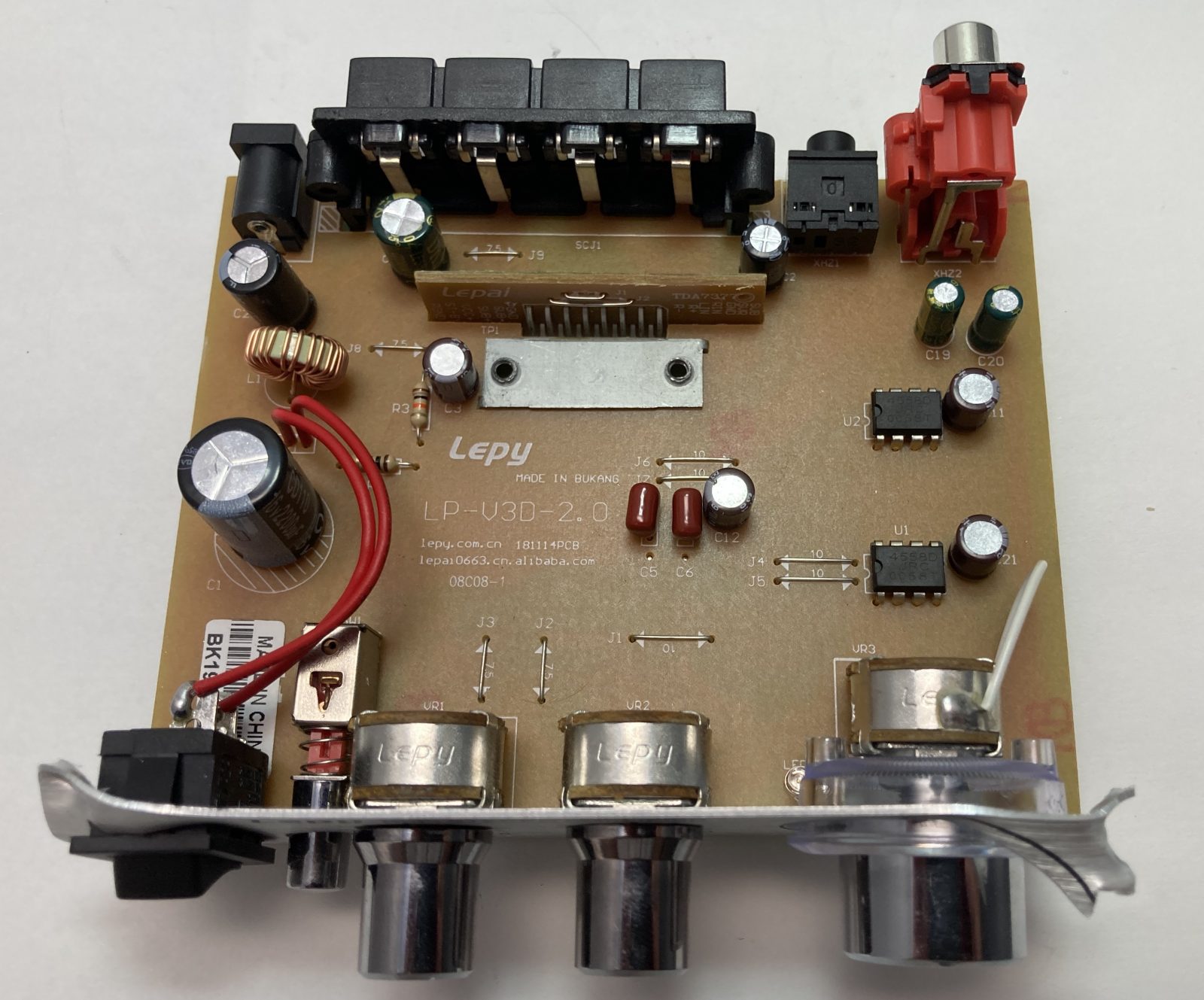
簡素な基板。Lepyのロゴの上あたりの裏側にトランジスタ(FET?)が張り付けてあり、アルミの筐体と直接接触して放熱されるようになっていた
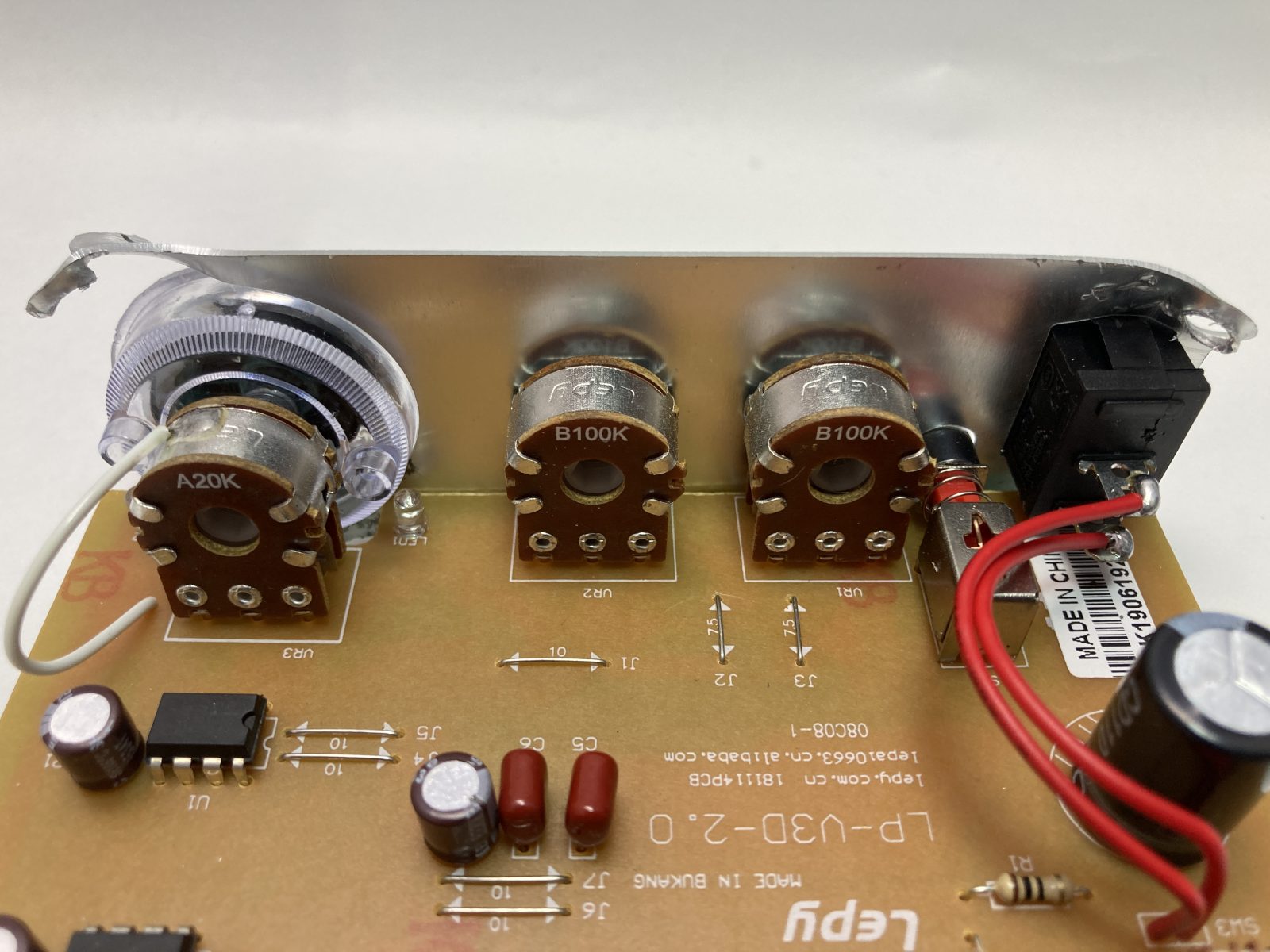
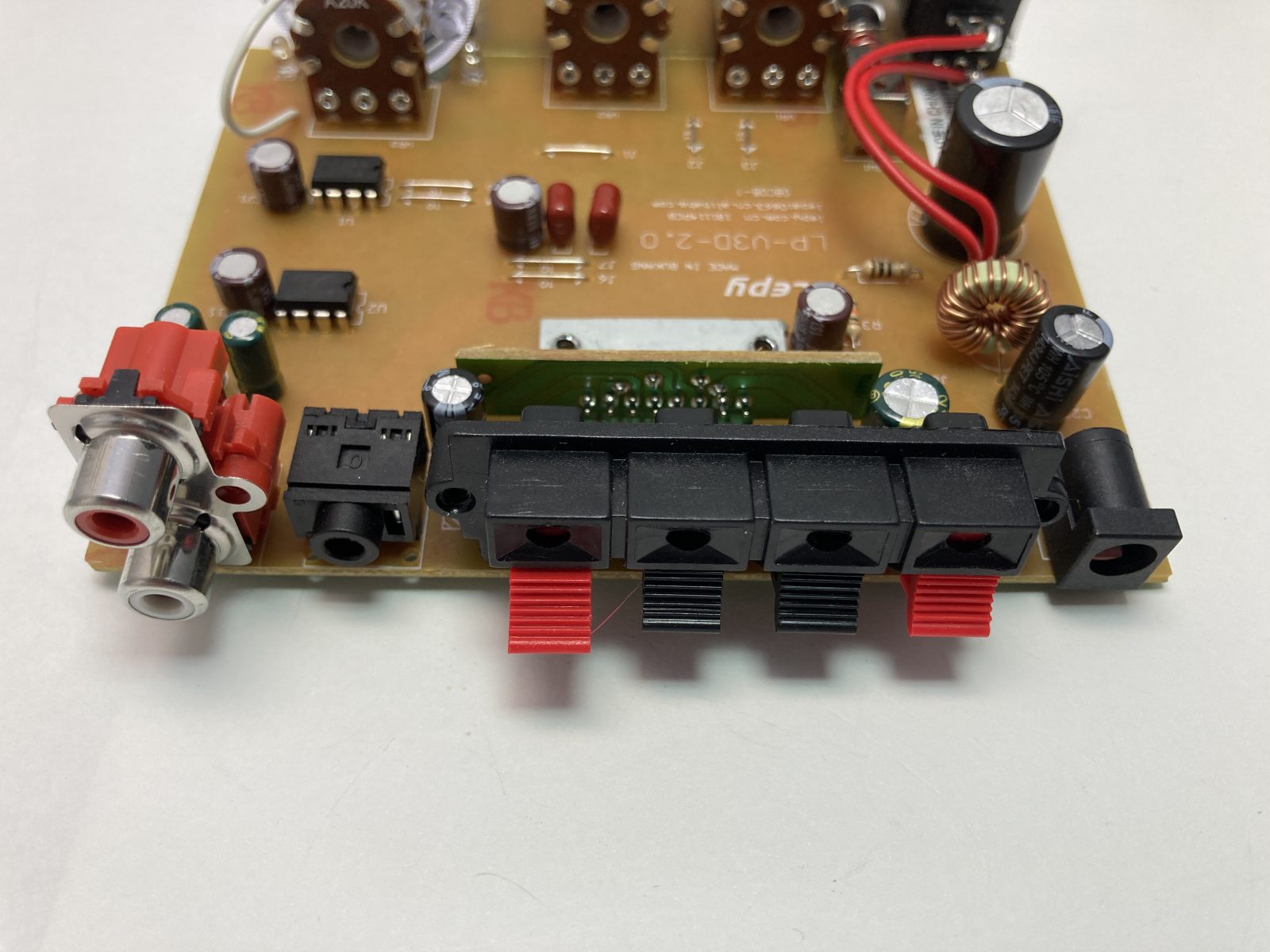
20kΩのボリュームが1個と100kΩのボリューム2個が、つまみ付きでゲットできた。何に使うか知らないが。また、ジャック類も何かに使えそう。コンデンサとコイルもあるが、これは私にはハードルが高そう
この破壊工作の際に金属の縁で指に小さな切り傷を作ってしまった
本日の教訓
うまく動いているシステムには手を付けるな
金属をねじ切った後、ケガに注意
2021/09/26
んねぞう



 ■ nNEZOU Portal
■ nNEZOU Portal ■ んねブラ(nNEBLUR)
■ んねブラ(nNEBLUR) ■ People I met in India
■ People I met in India ■ Murphy's Lawカレンダー
■ Murphy's Lawカレンダー ■ twitter (旧 X)(@nnezou)
■ twitter (旧 X)(@nnezou)
 ■ instagram (nnezou)
■ instagram (nnezou)
