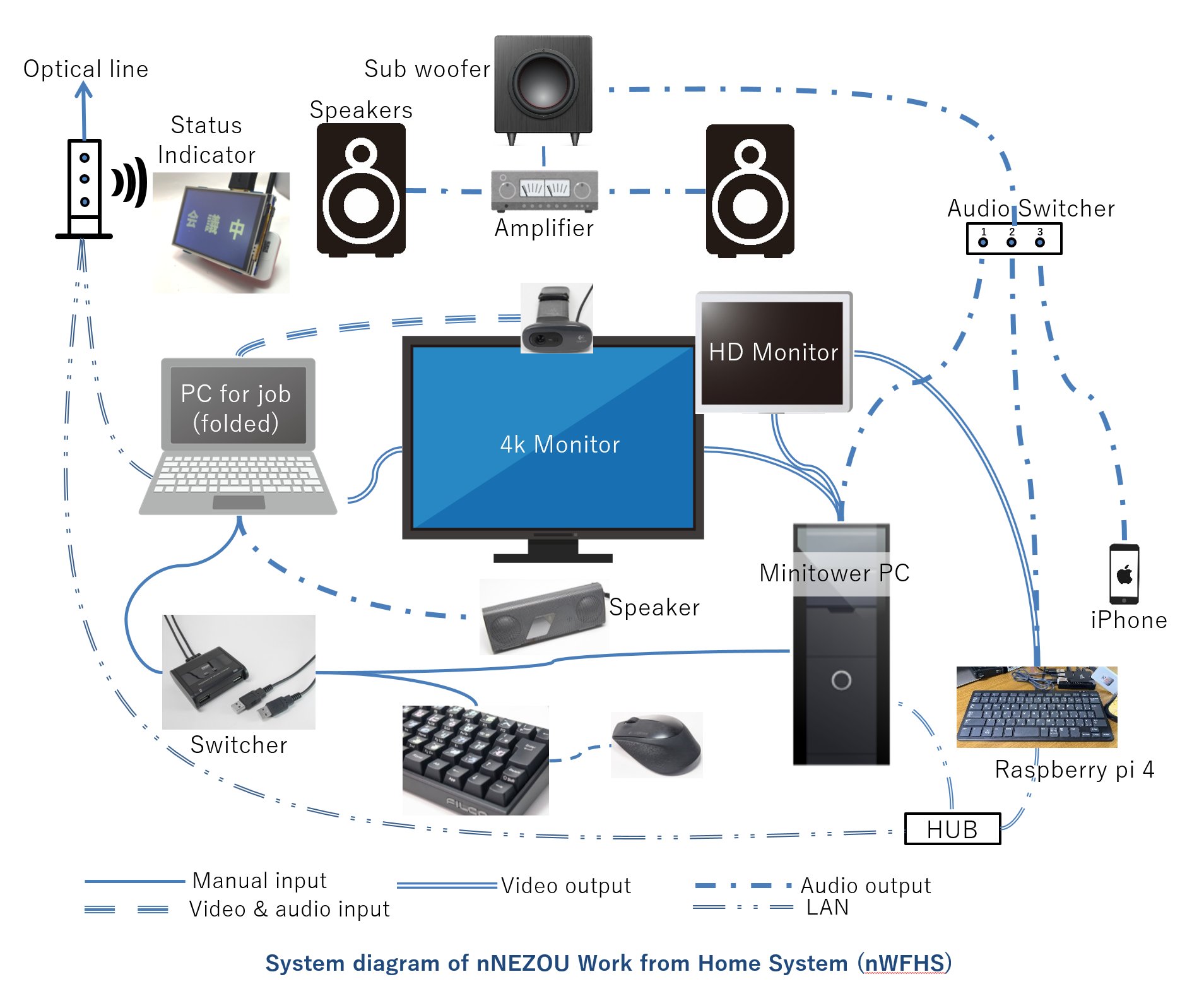
連休が始まって間もなくネットワークの接続が不安定なので見ていたら、ひかり回線のGW(Gateway)機器が電源断-再起動を繰り返していた。サポートに電話したら、交換品を送ってきてくれた。これでネットワークは安定したが、nWFHS (nNEZOU Work From Home System)のStatus IndicatorのRaspberry Pi (Zero WH)がつながらなくなった。GWのせいかわからないが、ホストからいくらpingを打っても届かない。これで数日悩んでいる。Raspbrry Pi 4でRaspberry Piのお作法通りに固定IPの設定をして、このSDカードをRaspberry Pi Zero WHに差し込むと全くネットワークから見えなくなる。
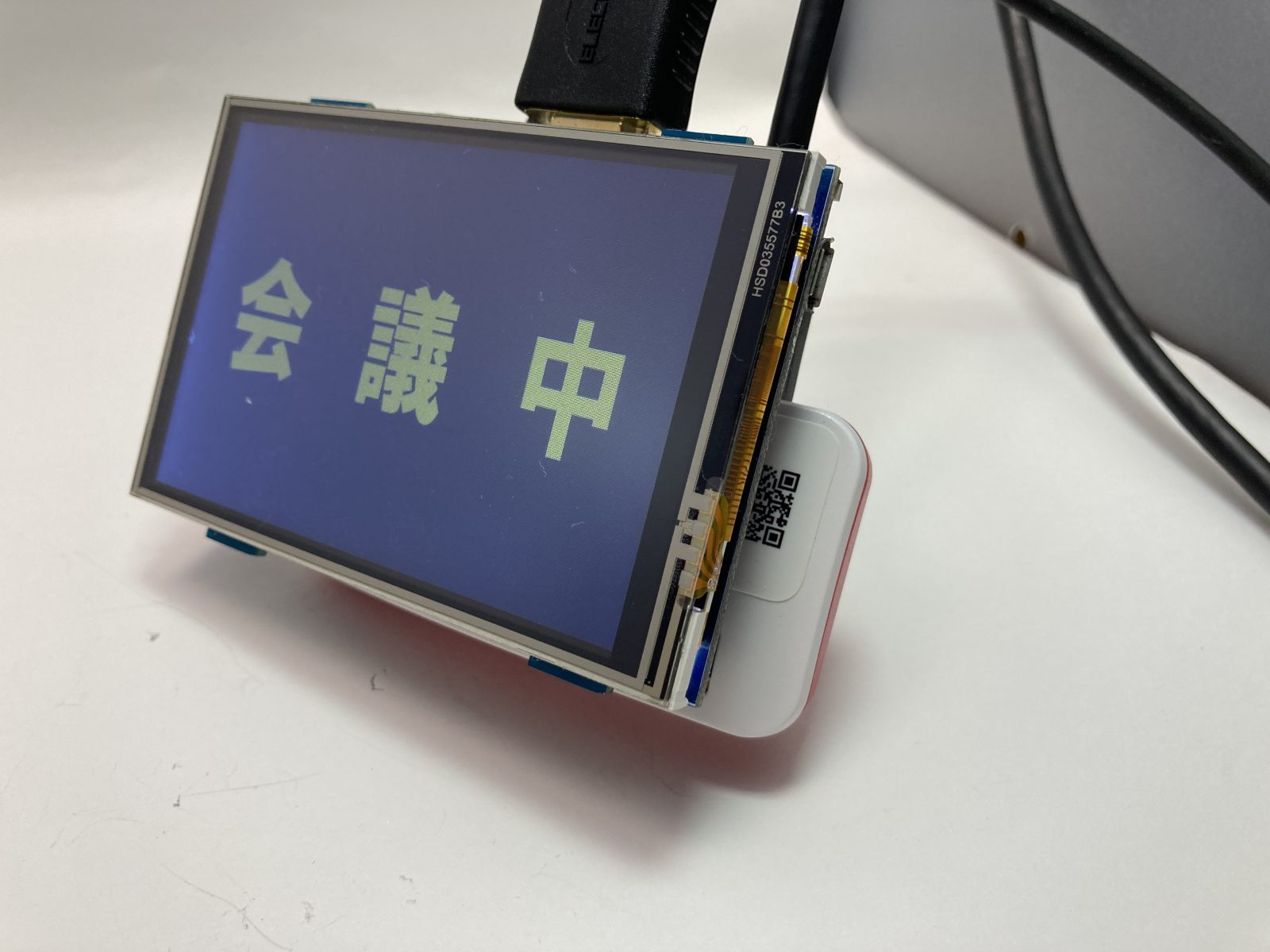
nWFHS (nNezou Work From Home System – んねぞう在宅勤務システム)の主要機能であるRaspberry Pi ZeroによるLED表示ができなくなった。止せば良いのに Pi Zero のアップデートをしたのが悪いらしく、これまでうまく行っていた環境が壊れてしまい、再インストールしても後の祭り。原因を究明する気力もないが、さりとて月曜日からの仕事にないと困るので、下記のように考えた。
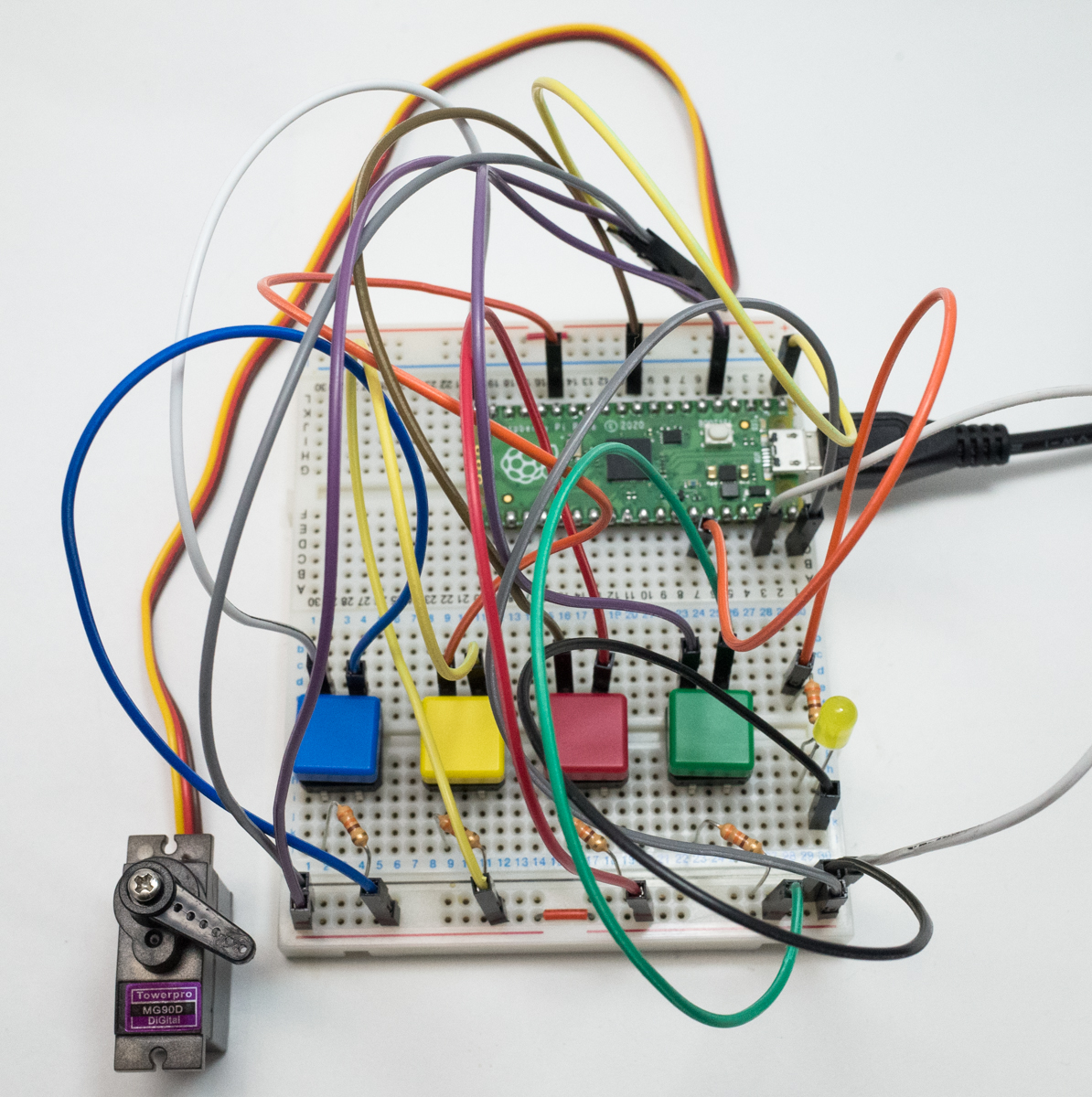
はんだ付けの後、どれ、と電源をつないでみたが、動かない。いろいろ調べてみたら、プログラム上のピン番号が違っていたのがわかり、はんだの付けなおし。また、Raspberry Pi Picoに接続するGPOIのピンが近接しすぎていてはんだの作業性が悪かったので、お互いに少し離したピンに接続。これでようやく動いた。(前の記事のプログラムは変更済)
Raspberry Pi Picoによるしょうもないシステムの専用機化、その第一弾「やる気のない信号機」。
昔作ったPythonのソースコードは、先日のデスクトップパソコンのシステムのクラッシュと共に失われ、またRaspberry Pi model 4Bの中にもあったはずだが、タッチディスプレイを試してうまく行かなかったときに、システムのクリーンインストールを何回もしていて跡形もないので、仕方なく作り直した。他人の参考にはまったくならないが、今後こういったことのないよう、自分の安全のために末尾に置いておく。何となく前回とGPIOだかPWM(Pulse Width Modulation)のコーディングのお作法が違っているような気がするが、動けば良い。今回は、専用機化に向けて、ブレッドボード上でのシステムの復旧まで。基板が届いた後本格的に作業したい
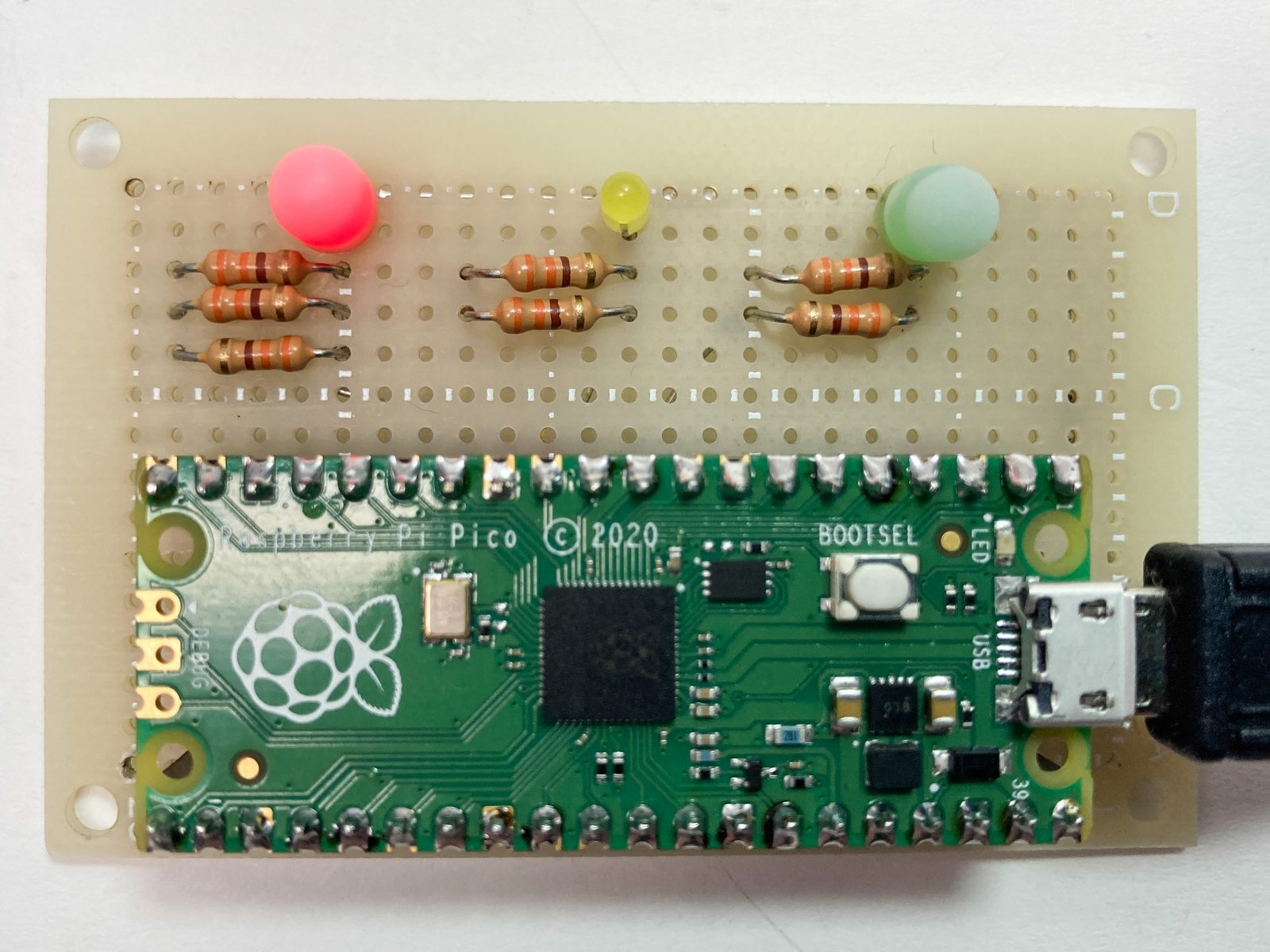
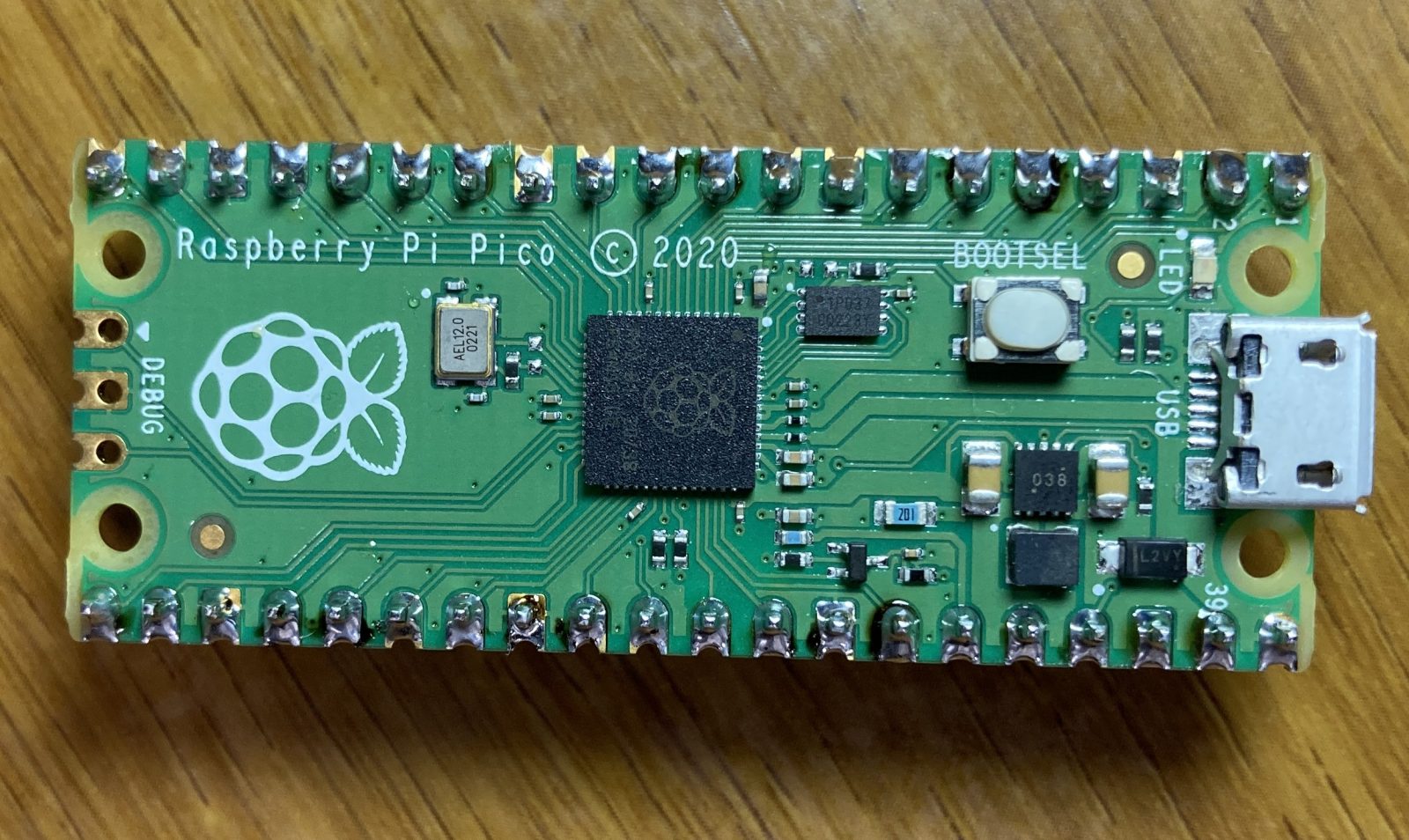
Raspberry Pi Picoという、コンピュータというかコントローラが気になり、試しに一つ買って見た。プログラムの開発のためのプラットフォームではなく、開発したプログラムをロードして実行させるためのもので、安価でコンパクトだ。これまで作ったソフトとハードウェアを一体化して残しておくのにちょうど良いと思う。
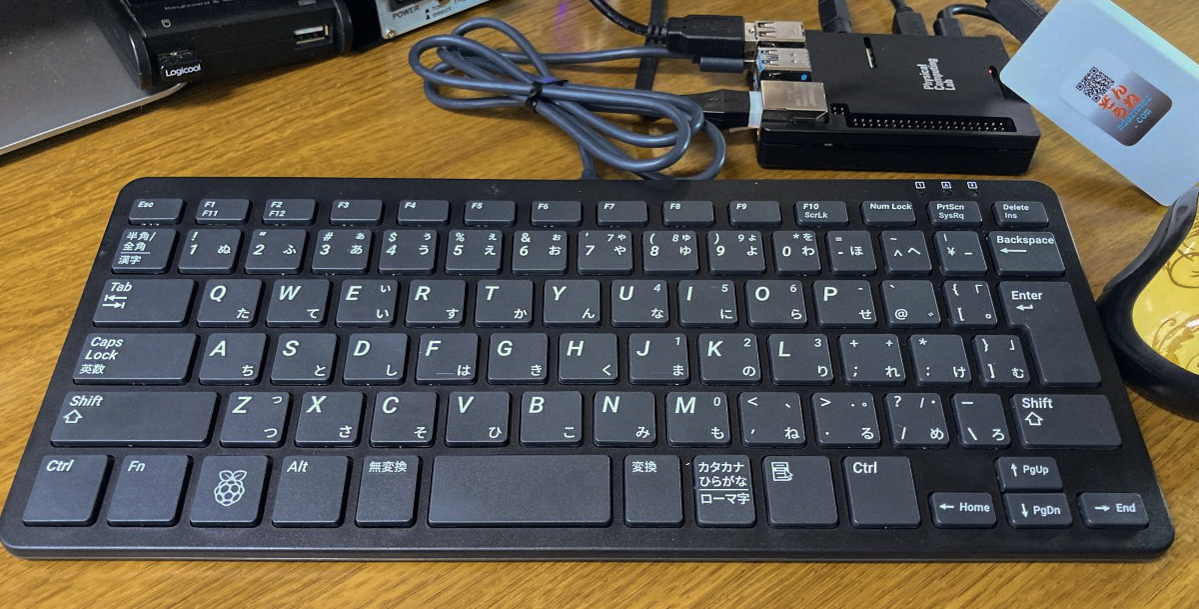
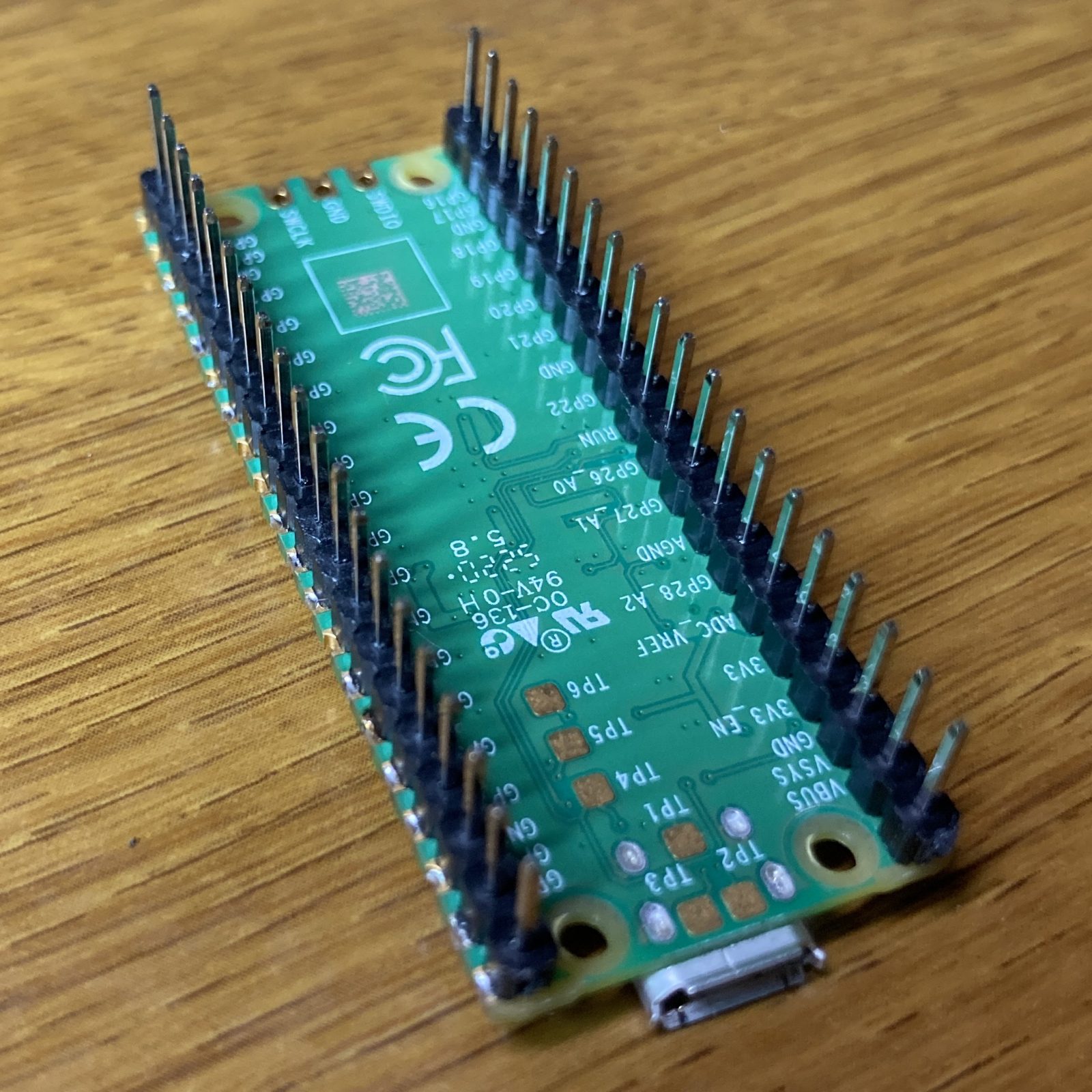
大きさは昔の板ガムを短く太くした位の大きさで、この中にコンピューティングパワーを秘めていると思うと、すごい時代になったものだと思う。思い立ったらすぐ欲しくなる質なのでAmazonで860円で買ったが、安いところでは550円で買えるし。因みにピンヘッダは自分で付けた。この前に、Raspberry Pi Model 4B用の、GPIOとブレッドボード接続キットのピンヘッダのはんだ付けをやって失敗して駄目にしたり、不注意ではんだごてのこて先をキーボードに当ててしまい、一部溶かしてしまったことはあまり言いたくない。言いたくないが、万一この記事を見られた方がいたとすると、この写真のはんだの状態を見てコメントしたくなるだろうから、言い訳のために言っておくのだ
プリントされた写真のスキャンにPFUのOmoidoriというキットを使っている。2017年に買って、そのあとiPhoneの機種変更(6s→8)に伴い、買い直した。今年の8月からiPhone SE(第2世代)への機種変更を考えていたが、そこでネックとなるのが、このOmoidoriの互換性だった。iPhone SE 第2世代が発売される直前にたまたまPFUからこのキットのサポート終了のアナウンスがあり、この時はすでにiPhone8とSE 第2世代の外形形状はカメラのレンズの位置まで同一であることは公知となっていたので、ダメもとでメーカに問い合わせてみたが、保障外とのこと











 ■ nNEZOU Portal
■ nNEZOU Portal ■ んねブラ(nNEBLUR)
■ んねブラ(nNEBLUR) ■ People I met in India
■ People I met in India ■ Murphy's Lawカレンダー
■ Murphy's Lawカレンダー ■ twitter (@nnezou)
■ twitter (@nnezou)
 ■ instagram (nnezou)
■ instagram (nnezou)
